![]()
ロボットのROS対応やROSを活用したシステム導入でお困りではありませんか?
富士ソフトはROS と ROS2を活用したシステムの構築や
ソフトウェアの開発を支援します
\ROSに関するお悩みがございましたらお気軽にお問い合わせください/
・ROS/ROS2ライブラリを使用して制御ソフト・システム開発を行いたいが、ROSに精通している人材がいない。
・メーカー製ロボットのROS/ROS2化を進めたいが、ROSに対する理解が不十分。
・ROS/ROS2ロボットをカスタマイズしたいが、技術的なサポートが不足している。
当社では、2025年5月にサポートが終了するROSからROS2への移行も対応しております。
詳しくは、「ROSからROS2への移行(マイグレーション)」の項目をご覧ください。
ROS と ROS2のソフトウェア開発についてアプリケーションからセンシング・ロボット制御まで全てにワンストップで対応でき、各種ロボットについてROS と ROS2での豊富な開発実績があります。また、次世代ロボット(スマートロボット)と言われるAI・物体/画像認識・遠隔制御・クラウド(RaaS)などの最新技術を活用した実績もあります。
- STRONG POINT -

ROS と ROS2で提供されているNavigation Stack, Navigation2, Perception, MoveIt,MoveIt2, Gazebo,Ignition Gazebo, Rviz,Rviz2, Open-RMF, micro-ROS, ros1_bridge, roswww, rosbride, roslibjs, ros_control, ros2_control,OpenCV, Point Cloud,Visual SLAM, Autoware, PCLなど様々なパッケージでのワンストップでの開発。AWSやAzureなどのクラウド環境での開発にも対応。また、お客様のお困り事や新規の開発を進めるために必要な要件定義などを実施するコンサルティングも可能。
- STRONG POINT -

産業用ロボット・協働ロボット・自律移動ロボット(AGV,AMR)・自立型海中ロボット(AUV)・宅配ロボット・サービスロボット・ドローンなどあらゆる形態のロボットのROS と ROS2での開発実績が多数。
- STRONG POINT -

AI・画像処理・遠隔制御・クラウド(RaaS)など最新技術を取り入れたスマートロボットへの対応実績。
活用シーンに応じて汎用性/拡張性に富むハードウェアを活用できるソフトウェア開発を支援します。

富士ソフトの支援領域
ROS と ROS2開発支援
アームロボット・自律移動ロボットの自動運転や人手作業の自動化といったROS と ROS2プラットフォームをベースとした新規システムの開発を支援します。
既存システムのROS対応、マイグレーション支援
異なるメーカーのロボットをROS と ROS2で開発したり、既存システムをROS と ROS2に連携させることによって、柔軟なシステムの構築を支援します。また、ROS1からROS2へシステム移行を行う際のマイグレーション支援も対応いたします。
環境構築支援
ROS と ROS2のパッケージ群やライブラリ群の中からお客様の開発に必要なものを選択し、お客様にとってより良い環境の構築を支援します。
デバッグ支援ソフト開発
ROS と ROS2の通信内容、センサー値等のログを取得できるツールの開発やお客様が開発したROS と ROS2ソースコードのデバッグを支援します。
シミュレーション環境構築支援
ロボットの導入前の事前確認のためのシミュレーション環境の構築を支援します。また、将来的にはデジタルツイン環境の構築も支援します。
プロトタイプ開発支援
製品化に向けたROS と ROS2のアルゴリズム検証やコード改修などの試作品の開発を支援します。
人手不足やコロナ禍を背景に、物流業界や飲食業界を中心として、AGVやAMRなどの自律移動ロボットの導入が盛んになってきました。また、すでに広く活用されている産業用ロボットとは違い、柵などで囲む必要がなく人と協働できる協働ロボットの開発や導入が盛んになっています。さらに業界を問わず、次世代ロボット(スマートロボット)やサービスロボットと言われるAIやクラウド(RaaS)などを活用した新たなロボットの開発も進められています。そのようなロボットの多くに採用されている技術として「ROS(Robot Operating System)」があります。
ROSは、ロボットのソフトウェア開発者向けのツールやライブラリから構成され、学術研究から産業用途まで幅広い分野で活用されています。アームロボット・自律移動ロボット・ドローン・自動運転・IoTなど幅広い用途に対応しており、オープンソースの豊富なパッケージを利用することでアームロボットの動作生成や、自律移動ロボットの経路生成などを効率的に作成することができます。
ROS1 |
|
|---|---|
| 対応 OS | Linux(Ubuntu) |
| 開発言語 | C++, Python |
| 通信方式 | XMLRPC, TCPROS, UDPROS |
| 主要パッケージ | Navigation Stack, MoveIt |
| ツール類 | Rviz, RQt, VSCode |
| シミュレータ | Gazebo, Isaac Sim, Unity, Webots |
![]()
![]()
Plumbing
(通信)
ロボット処理向きの分散システムのため、出版/購読型を採用したノード間通信
![]()
Capabilities
(機能群)
ロボット開発に役立つ機能を備えた数多くのライブラリやパッケージ群
![]()
Ecosystem
(エコシステム)
Wikiや掲示版、開発者発表会などの大規模かつ活発なコミュニティ活動
![]()
Tools
(ツール群)
通信の可視化、監視、ログ取得等の開発効率を支援する豊富なツール群
ROS(ROS1)は学術研究を主な対象として開発が始まりましたが、次第に商用にも利用が広がったこともあり、ROSの商用利用を目的とし、ROS1のコンセプトはそのままにセキュリティ・メンテナンス性・商用サポートなどのさまざまな観点から見直された次世代バージョン「ROS2」が開発されました。
ROS2が開発された経緯や新たに実装された機能などについては、インターネットで検索していただければヒットする記事があると思いますので、ここでは執筆時点でのROS2の現在地について筆者の主観を記載します。
当社にご相談や開発依頼をしてくるお客様で、新規でロボット等を開発しているお客様はROS2で開発を進めています。最近ROS界隈で注目されているNVIDIA社のIsaac ROSでは対象をROS2に限定しており、ワールドワイドでもROS2での開発に移行していることがうかがえます。さらに、開発元であるOpen Roboticsが新しいROS2群制御ライブラリ「Open-RMF」を開発しており、Gazebo Ignitionと並んで力を入れています。これにはfleet adapter、Free Fleet、Traffic Editor、RMF Web、RMF Panelといった多数のツールで群制御の基本機能が含まれています。
また、ROS2へ開発が移行し始めている背景としては、2025年のROS1のサポート終了、通信ミドルウェアとして信頼性の高いDDS(Data Distribution Service)や通信プロトコルとしてRTPS(Real-Time Publish-Subscribe)が採用、Microsoft社のVSCodeやMathWorks社のMATLAB & Simulinkなどの開発環境の整備。更にROS2のメジャーなパッケージ(Navigation2、MoveIt2など)のバグ改修などの開発の早さやロボット等で使用される各種センサーデバイス(Lidar、カメラなど)もメジャーなセンサーメーカーはROS2の対応が完了しており、ROS2での開発を後押ししています。
ROS2 |
|
|---|---|
| 対応 OS | Linux(Ubuntu), Windows, Mac |
| 開発言語 | C++, Python, Rust |
| 通信方式 | DDS/RTPS |
| 主要パッケージ | Navigation2, MoveIt2 |
| ツール類 | Rviz2, RQt, VSCode |
| シミュレータ | Ignition Gazebo, Isaac Sim, Unity, Webots |
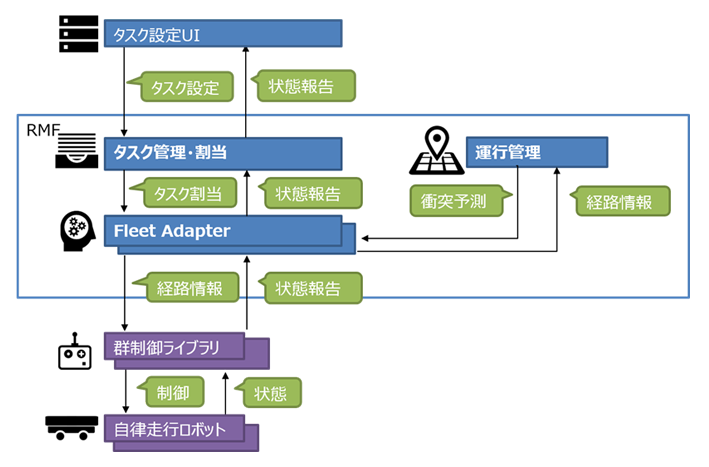
近年、複数台のロボットを組み合わせて配備することが一般的になりつつあります。このような状況では、群制御という技術が求められ、効率的な管理と制御が求められます。Open Roboticsでは、Gazebo Ignitionと並んで、新しいROS2ライブラリ 「Open-RMF」の開発に注力しており、これは複数のロボットを効率的に一元管理するための群制御ライブラリです。
このライブラリは「タスク管理・割当」「運行管理」「Fleet Adapter」という3つの機能で構成されており、他にもFree Fleet、Traffic Editor、RMF Web、RMF Panelなどのツールで運用されています。
物流や工場などでのAGVやAMR、公共施設のサービスロボット等、複数のロボットを効率的に運用する際に役立ち、運行管理や衝突回避、タスクの割り当てやインフラ(自動ドアやエレベーターなど)との連携などの機能を提供します。
当社では、このライブラリを用いた調査・検証、他社とのPoC等を行っていますので、ぜひ弊社にご相談ください。
2025年5月末をもって、ロボット開発で長年利用されてきたROS(ROS1)の公式サポートが終了します。
サポートが終了後、ROSは下記に対応できず、リスクが生じる可能性があります。
・セキュリティアップデート: 脆弱性への対応が難しくなります。
・新機能や更新バイナリの提供: 最新OSやライブラリの互換性が失われる可能性があります。
・バグ修正、パッチ、サポート: サポートが減少し、人材確保が難しくなるおそれがあります。
年々、新バージョンであるROS2の利用者は増加しており、2024年時点ではROS2パッケージダウンロードは公式から全体の8割と発表されています。
ROSからROS2への移行は、ROS_bridgeを活用した一時的な対応もありますが、本格的な対応ではcatkinビルドシステムをament,colconビルドシステムへの変更、roscppからrclcppへのクライアントライブラリの変更などが必要となり、パッケージ毎に適切な移行処置を行う必要があるため、実際の対応には時間がかかることが予想されます。
弊社では、既にROS1で開発されているシステムのROS2移行サービスを始めております。
ROS1,ROS2に関する豊富な知識を利用し、お客様がお使いのROS1システムをROS2システムへの移行対応などをお手伝いしております。
様々なROSバージョンのROS2移行にも対応をいたしますので、移行を検討されている際はぜひ弊社へご相談ください。
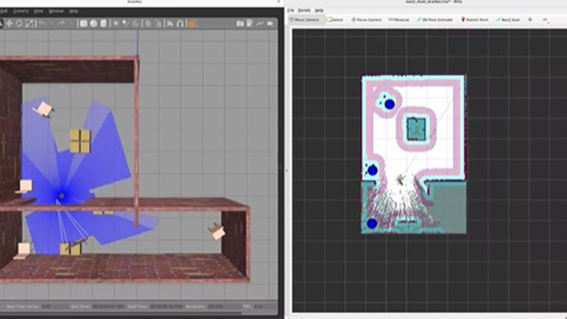
Visual SLAM(Visual Simultaneous Localization and Mapping)は、画像情報を基に、自己位置推定と地図作成を同時に行う技術です。カメラで取得した画像からORBやSIFTなどのアルゴリズムで特徴点を抽出し、時間的変化に伴う特徴点の動きを分析することで、自己位置の推定と地図作成を実現します。さらに、Loop Closureやバンドル調整などの手法を用いて、精度の向上と最適化が行われます。
自律移動ロボットでは通常2D LiDARが使用されており、当社でも多くの実績があります。しかし、2D LiDARは直線が続くような特徴が少ない地形では位置推定が難しくなるという課題があります。画像は多くの特徴を持っており、Visual SLAMでは2D LiDARが苦手とする場所でも、自己位置推定や地図作成の精度向上が期待できます。市場でも専門的なVSLAM技術を有する企業や、ORB-SLAM3、Isaac ROS Visual SLAMなどの技術が注目されています。
現在のVSLAMの課題として、いくつか挙げられます。特徴点を基に位置推定を行うため、似た特徴点を持つ場所に遭遇すると、誤って以前保存した位置に戻ってしまうことがあります。また、単色の壁や照明条件の変化、視界の障害物などで特徴が少ない環境では、十分な特徴点を抽出することが難しくなり、自己位置推定の精度が低下する可能性があります。
当社では、これらの課題への模索や、VSLAM技術のNavigation2への適用といった検証を行っています。VSLAMに関するご質問があれば、ぜひ弊社にご相談ください。
Autowareは、ROSをベースに開発された世界初の自動運転用オープンソースソフトウェア(OSS)であり、LiDAR・カメラ・レーダー・IMU・GNSSなどのセンサー情報が統合され、主に公道での認知・自己位置推定・経路計画・車両制御などの自動運転に必要な機能で構成されています。
また、Autowareのソフトウェアスタックとしては、センシング(SENSING)、ローカライゼーション(LOCALIZATION)、認知(PERCEPTION)、判断(PLANNING)、操作(CONTROL)、車両インターフェイス(VEHICLE INTERFACE)、地図データ(MAP DATA)などで構成され、様々な車両・用途での商用利用が可能となっています。
富士ソフトは、自動車の先進技術分野で幅広く貢献し、モビリティの発展を支えていくことを目指し活動しています。オープンソースの自動運転ソフトウェアAutowareの開発を主導するティアフォーと協業し、Autowareを活用した研修・教育講座を提供・修了認定する「TIER IV Autoware Partner Program」に参加し、ティアフォーとの強力なパートナーシップの下、ビジネスを推進しています。
Autowareに関するお問い合わせ等が御座いましたら、ぜひ弊社へご相談ください。
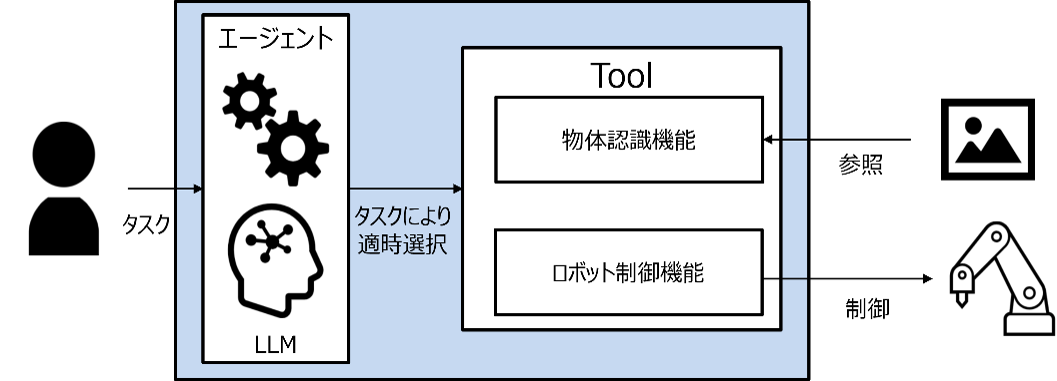
生成AIとは、膨大なデータを基に新しいコンテンツを自動的に作り出すAI技術のことを指し、特に画像生成や文章生成の分野で注目されています。生成AIの中でも、LLM(大規模言語モデル)は、インターネット上の膨大なデータを学習した高度なAIモデルであり、自然言語処理(NLP)技術を活用して、与えられた文章から要約や質問応答、さらには高度な文書生成が可能となります。
特に、ChatGPTやMicrosoft 365 Copilotに搭載されているGPTは、その代表的な活用例として広く知られています。文章だけでなく、画像も活用できるVLM(視覚言語モデル)などの新しい技術も登場しています。最近では、生成AIの技術がロボット技術にも応用されつつあります。NVIDIAのAgent Studioをはじめ、VoxPoserやLIVといったロボット制御の研究用ライブラリ、またros2aiやROSA、Llama_rosなど、LLMを利用したROS制御ライブラリが登場しています。言語による指示でロボットを操作することができる可能性が高まっています。この技術革新により、将来的にはロボット操作の敷居が低くなり、企業の生産性向上やコスト削減に寄与することが期待されています。
富士ソフトでは、ロボットへの生成AIの活用についての研究を進めており、画像と命令から次のロボット動作を生成する「Open-VLA」や、ROSをベースにしたAIエージェントフレームワーク「RAI」などを活用し、実機での検証を行っています。

センサーフュージョンを用いた屋外走行AGVの開発
複数のセンサー情報(LiDAR、GPS)によるセンサーフュージョンやマルチマップ切替により
高精度な自己位置推定を行うことでAGVの屋外走行を実現
他にも多数の活用実績があります。
社外に公開できない情報もありますので、実績詳細をご希望の方はお気軽にお問い合わせください。
ナビゲーションシステムの地図なし走行化によるコスト削減
地図なしナビゲーションシステムExploreと物体検出アルゴリズムYOLO、深度センサによる位置特定などの技術を組み合わせることにより、事前の地図準備を不要とし、コスト削減に繋がるシステムを構築した
協働ロボットの作業変更に柔軟に対応する画像処理開発研究
~OpenCVとROS2の結合~
ルールベースの画像処理ライブラリであるOpenCVを用いることで、カメラの設置位置や照明の変更に対して低コストかつ柔軟に変更
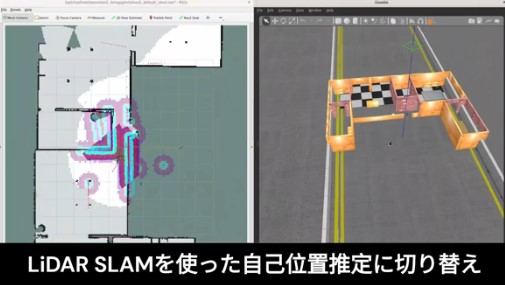
屋内外環境での自律移動ロボットの自律走行システムの構築
屋内ではLiDARを中心とした自己位置推定システム、屋外ではGPSを中心とした自己位置推定システムを切り替えることにより、自律移動ロボットの屋内外走行システムを構築

検出物体に対するセンサーフュージョン技術の三次元データ生成
「カメラより得た画像データ」に対する物体検出技術と、「画像データ + LiDARから得た点群データ」にセンサーフュージョン技術を組み合わせて、検出物体の大きさや長さの情報を含んだ三次元データの生成
FUJISOFT Technical Report
ROS(Robot Operating System)は、日本においてはまだ知る人ぞ知る、ロボットのソフトウェア開発技術です。海外では、ロボット以外でもROSを活用した様々な開発が行われています。パソコンやスマートフォンのOSは、WindowsやiOS、Androidなど海外勢に取って代わられましたが、ロボットのソフトウェア開発においては、ROSが主流になる可能性も高いのではないでしょうか。
Monoist
人手不足やコロナ禍を背景に、物流業界や飲食業界を中心にして、AGV(Automated Guided Vehicle)やAMR(Autonomous Mobile Robot)などの自律型移動ロボットの導入が盛んになってきた。また、以前からある産業用ロボットとは違い、柵などで囲む必要がなく人と協働できる協働ロボットの開発や導入が盛んになっている。そのようなロボットの多くに採用されている技術として「ROS(Robot Operating System)」がある。
FUJISOFT Technical Report
近年、ロボット技術の発達・普及に伴い、様々な産業で自律移動ロボットの導入が進んでいます。運搬や清掃など、ロボットの役割も多岐にわたります。複数台、複数社のロボットを組み合わせて同じ環境に配備することも珍しいことではなくなりました。そのような現場では、「複数台のロボットを効率的に制御する」、「複数社のロボットを一括管理する」といった課題を抱えているのではないでしょうか。
Monoist
ロボットプラットフォームとして知られる「ROS」の需要が高まり続けている。本稿では前後編に分けて、ROSの進化とデジタルツインの可能性について考察する。前編では、ROSの最新動向とデジタルツインへの対応状況について紹介する。
Monoist
ロボットプラットフォームとして知られる「ROS」の需要が高まり続けている。本稿では前後編に分けて、ROSの進化とデジタルツインの可能性について考察する。後編では、ROSのデジタルツイン活用の事例として、ROS 2を実装したロボットの実機とシミュレーションの連動について紹介する。
Monoist
ロボット制御における生成AIの活用に焦点を当て、前後編に分けて解説する。前編では、生成AIの概要とロボット制御への影響について解説し、ROSにおける生成AI活用の現状について述べる。
Monoist
ロボット制御における生成AIの活用に焦点を当て、前後編に分けて解説する。後編では、ROSのAIエージェントライブラリ「RAI」の概要と、RAIを用いた生成AIによるアームロボット制御の事例を解説する。
ROS と ROS2開発はぜひ、
富士ソフトにご用命ください!