お問い合わせ
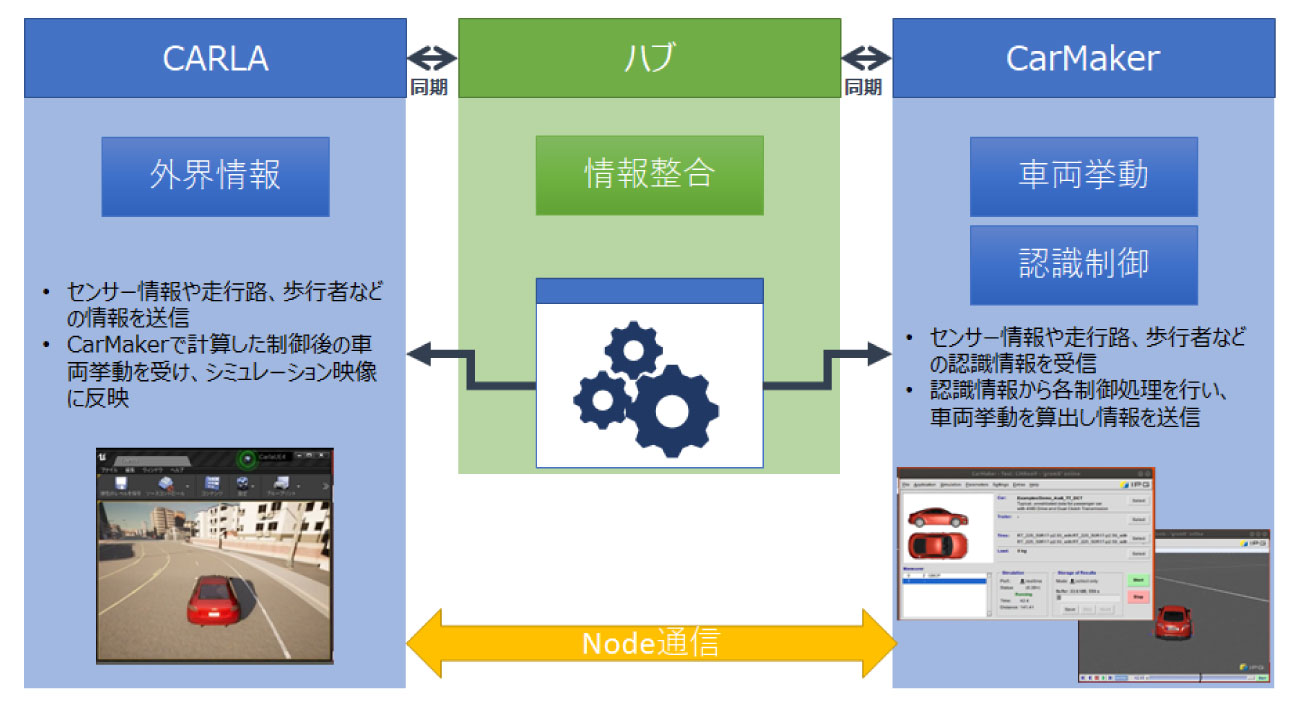
CAEツール毎にROS Node Adapterを構築し、Co-Simulationする環境を構築
ROSをベースにSLAMによる自動走行制御、plugableなアタッチメントに対応した移載動作や安全性への配慮などFA特有の振る舞いを可能とする機能の開発、 および製造実行システムや配車システムなどの上流システムとの連携動作機能を開発
ROS開発はぜひ、 富士ソフトにご用命ください!
お問い合わせはこちら