![]()
![]()
22軸サービスロボットを複数台同時に制御可能とするシミュレーションシステム開発
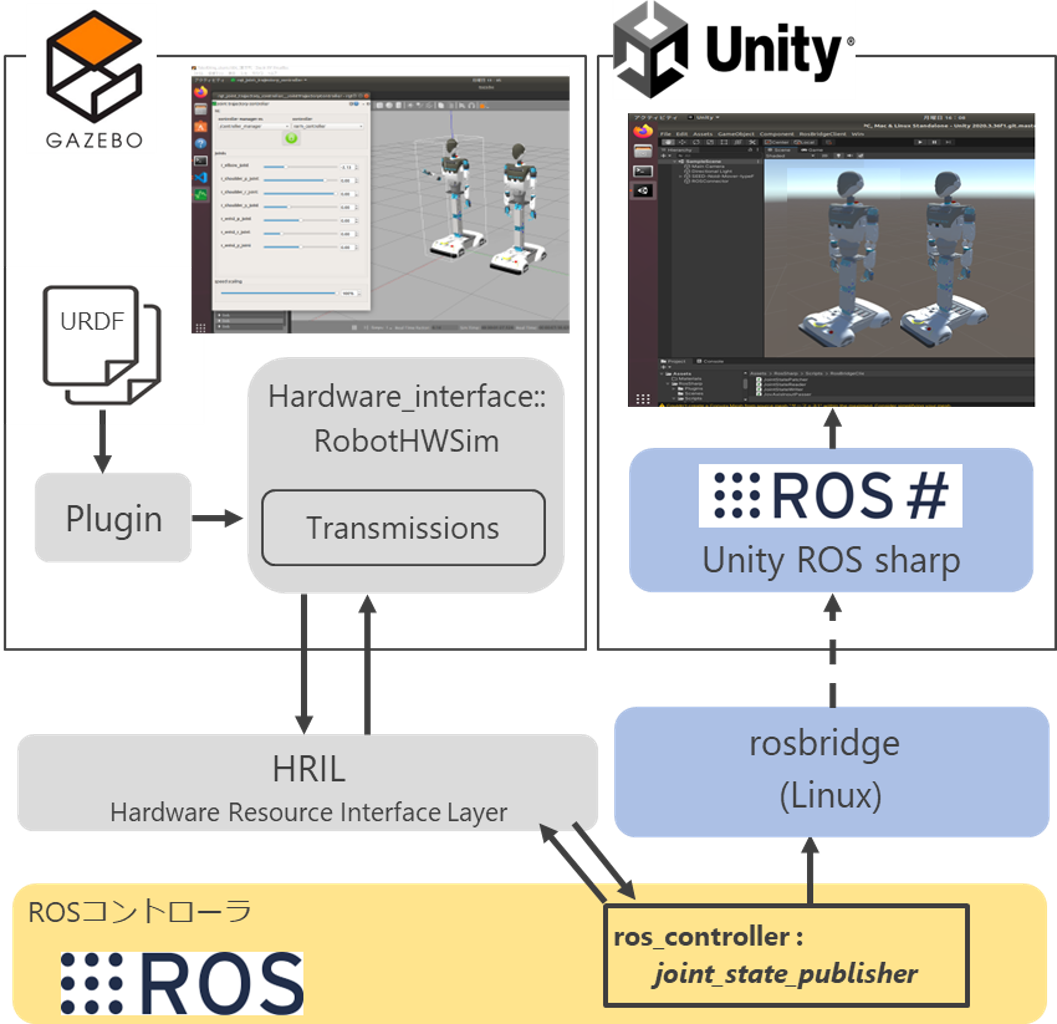
スマートアクチュエータを搭載した多関節サービスロボット「SEED-R7シリーズ」を使用し、複数台を協調動作可能とするロボットモデル(URDF/SDF)設計およびROSコントローラ改修を行った。
シミュレータには、ROS開発で一般的に用いられる「Gazebo」、Gazeboよりも優れた物理エンジンであるUnity Physicsを搭載した「Unity」の2つを採用し、より精度の高いシミュレーション環境を提供した。
ROS開発はぜひ、
富士ソフトにご用命ください!