![]()
![]()
各自律移動ロボットメーカーは自社の自律移動ロボット(搬送ロボット(AMRやAGV), 清掃ロボット, 警備ロボットなど)の複数台・群制御などには対応しているが、他社のロボットにも対応したシステムは少ないため、多種類の自律移動ロボットに対応できるOpen-RMFを検証
近年、物流や医療、飲食サービスなど様々な業界において、人手不足が大きな社会問題となっています。この問題を解決するために、自律移動ロボット(搬送ロボット(AMRやAGV)、清掃ロボット、警備ロボットなど)の導入が検討されています。自律移動ロボットを導入する場合、複数台での運用が一般化されつつあり、複数台のロボットを制御するシステムの導入が欠かせない状況となっています。しかしながら、このような複数台の制御システムは、各ロボットメーカーがそれぞれのロボット用に開発しており、多種類の自律移動ロボットを同時に制御できないという課題があります。
この課題を解決するために、複数台・群制御のシステム開発にOSSであるROS(Robot Operating System)やROS2で開発されたOpen-RMFを利用し、様々なメーカーのロボットの一括制御・管理を行うことができます。また、Open-RMFには複数台・群制御の標準的な機能が備わっており、新たに独自でソフトウェアを開発する必要もなく、開発コストを削減することができます。さらに、お客様のニーズに合わせた独自のタスクを作成できるという拡張性も持ち合わせてます。(Open-RMFの標準的な機能は、こちらを参照)
具体的な検証としては、下記の環境を用意し、1,2の検証を行いました。
用意した環境
・シミュレーターにて複数台の自律移動ロボットが稼働する倉庫を再現
・多種類の自律移動ロボットとしては、ROS(Navigation Stack)とROS2(Navigation2)にて実装
・複数台・群制御を実行させるため、Open-RMFでの運行を管理
検証確認内容
1. 多種類の自律移動ロボットに対して、Open-RMFを用いた複数台・群制御を行うことができるか検証
2. Open-RMFにおいての多台数(数十台)のロボットを制御する方法の検証
検証内容1,2に対する結果は、下記の1,2となりました。
1. ROSとROS2にて実装した多種類の自律移動ロボットに対して、Open-RMFでの複数台・群制御ができることを確認
2. ロボット同士の干渉を減らすエリアや通路の構築を行うことで処理負荷を軽減し、Open-RMFによる多台数でのロボットの制御ができることを確認
(動作の様子は、下記のデモ動画を参照)
今回の検証結果として、Open-RMFを活用することにより、多種類の自律移動ロボットを複数台・群制御できることを確認しました。
今後は実際の自律移動ロボットを用いた検証やROS未対応の自律移動ロボットも含めた混在環境での複数台・群制御ができるか検証の予定です。
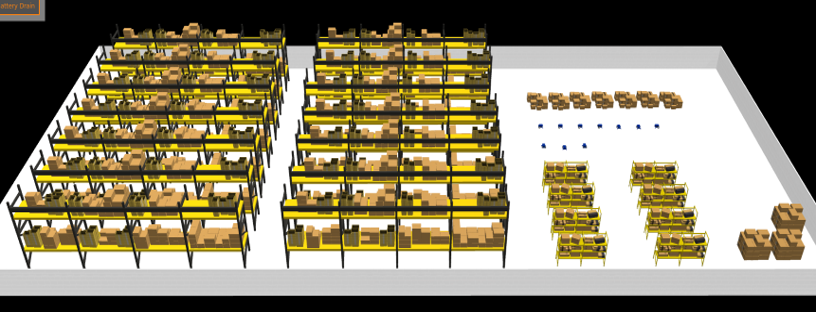
倉庫を想定したシミュレーション環境
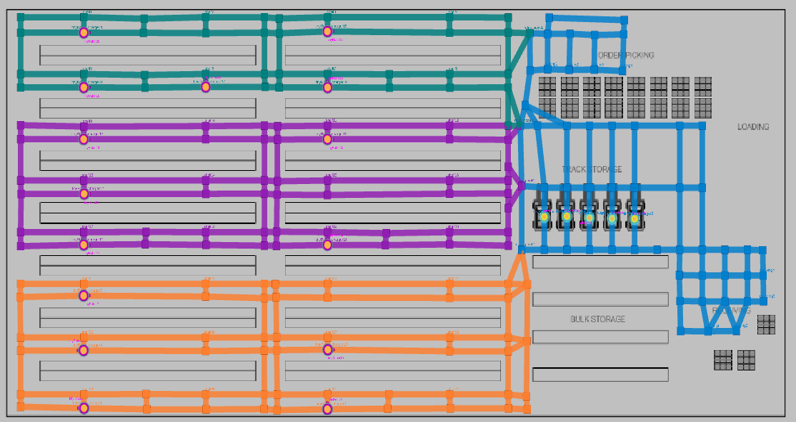
ロボットの通路と現在地の可視化
(ロボットは設定した通路上のみ動くことができる)
ROSとROS2開発はぜひ、
富士ソフトにご用命ください!