![]()
![]()
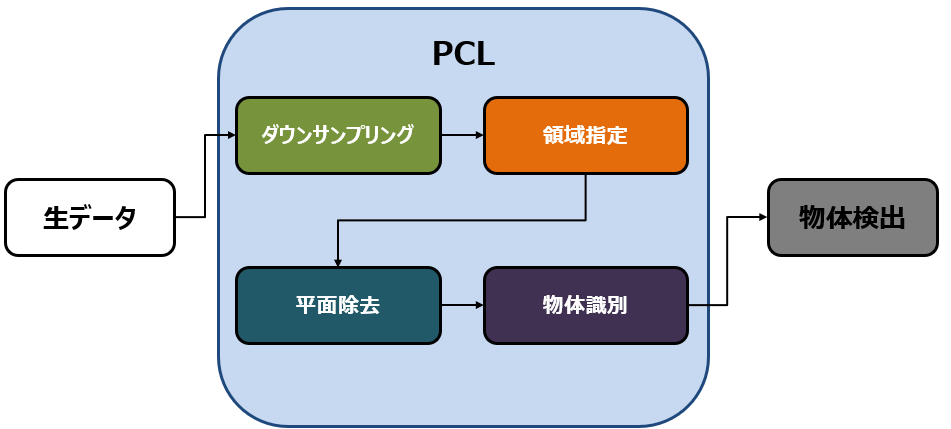
3次元点群処理ライブラリであるPCL(Point Cloud Library)をROS2環境上で利用した物体検出を研究
光による距離検出センサであるLiDAR(北陽・Ouster・Velodyne・Livox・Hesai...)は、自動運転の技術として注目を集めています。また、近年はLiDARの低価格化が進んでおり、セキュリティやスマートフォン、医療、スポーツなど、様々な分野での活用が始まっています。その中でも、弊社ではセキュリティ分野における人物検出の研究について検証を行っています。
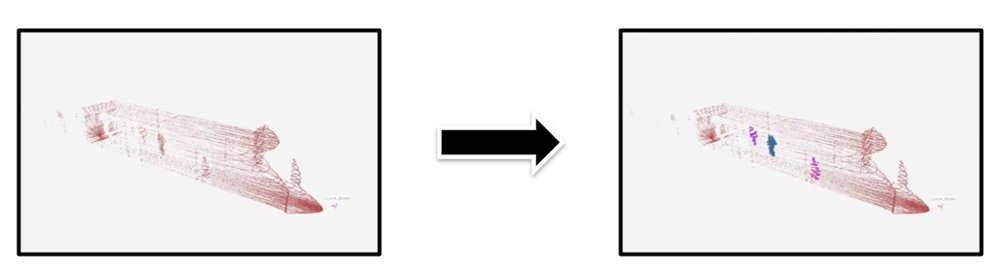
本研究では、3D LiDARの点群情報に対して、ROS2環境上で3次元点群処理ライブラリであるPCL(Point Cloud Library)を利用した点群加工を施し、生データから人物を検出することができるか検証しています。検証では、実機の3D LiDARを弊社オフィスの廊下に設置し、得た実際のLiDAR点群情報に対して、PCLを使用した技術の1つであるクラスタリングにより人物の点群を抽出しました。しかし、クラスタリングのみでは認識率が低いので、前処理としてダウンサンプリングや平面除去を応用し、認識率を向上させました。
ROSとROS2開発はぜひ、
富士ソフトにご用命ください!