![]()
![]()
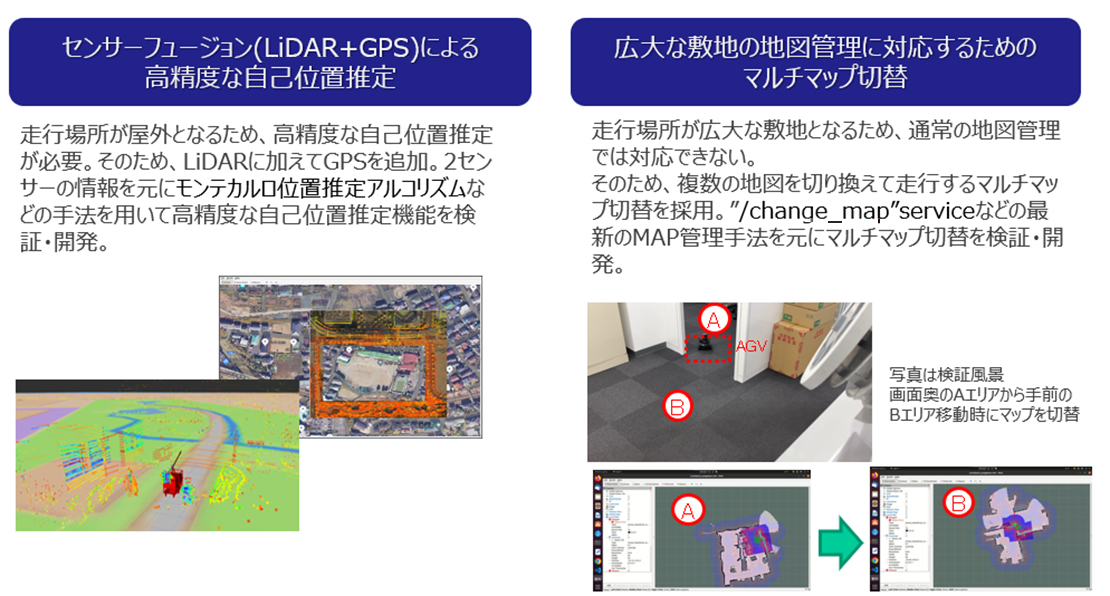
複数のセンサー情報(LiDAR、GPS)によるセンサーフュージョンやマルチマップ切替により 高精度な自己位置推定を行うことでAGVの屋外走行を実現
◆広大な敷地内を走行するAGVの開発事例
屋外走行を実現するためにROSのNavigation Stackに対して、下記の技術要素を使用して対応
- LiDARとGPS、両方のセンサー情報を合成(センサーフュージョン)した、高度な自己位置推定
- マルチマップ切替により、広大な敷地の地図を複数枚に分割して管理
ROS開発はぜひ、
富士ソフトにご用命ください!