![]()
![]()
屋内ではLiDARを中心とした自己位置推定システム、屋外ではGPSを中心とした自己位置推定システムを切り替えることにより、自律移動ロボットの屋内外自律走行システムを構築
物流や医療、飲食サービスなど様々な業界において、人手不足が大きな社会問題となっています。この問題を解決するために、自律移動ロボット(搬送ロボット(AMRやAGV)、清掃ロボット、警備ロボットなど)の導入が検討されています。
これらの自律移動ロボットは設置する環境によって、使用するロボットや、使用するナビゲーションシステムが変更されます。その理由は、自己位置を推定するためのセンサ(カメラやLiDAR, IMU, GPS, オドメトリなど)は得意不得意な環境があるからです。特に、屋内と屋外では得意不得意な環境が異なります。例えば、カメラや2D LiDARは屋内環境ではロバストな情報取得を行えますが、屋外環境では、不安定になるという課題があります。しかし、国内外問わず、工場・倉庫間移動や巡回警備において屋内外を走行できるロボットが求められています。通常、環境ごとにロボットを準備する必要があり、コストがかかります。そのような背景から、海外では屋内外走行できる自律移動ロボットが増加しています。そこで、富士ソフトでは、同一のロボットで屋内外を走行できるような自律移動ロボットのナビゲーションシステム構築の調査・研究を行いました。
今回の調査・研究では、以下の要件で屋内外自律移動ロボットのナビゲーションシステムの検証を行いました。
1. ROSシミュレーション環境であるGazeboを利用
・シミュレーション環境内部にて緯度経度を取得
・屋外環境 : 現実に実在するカーレース場(Gazeboのsample)のシミュレーション環境を準備
・屋内環境 : カーレース場の中に、家を準備
2. ナビゲーションシステムとして、ROS2の標準的なナビゲーションシステムのNavigation2を利用
3. 屋内外で自己位置推定システムを切り替え
・屋外環境 : GPSを中心とした自己位置推定システム(GPS_Waypoint_followerを利用)
・屋内環境 : LiDARを中心とした自己位置推定システム
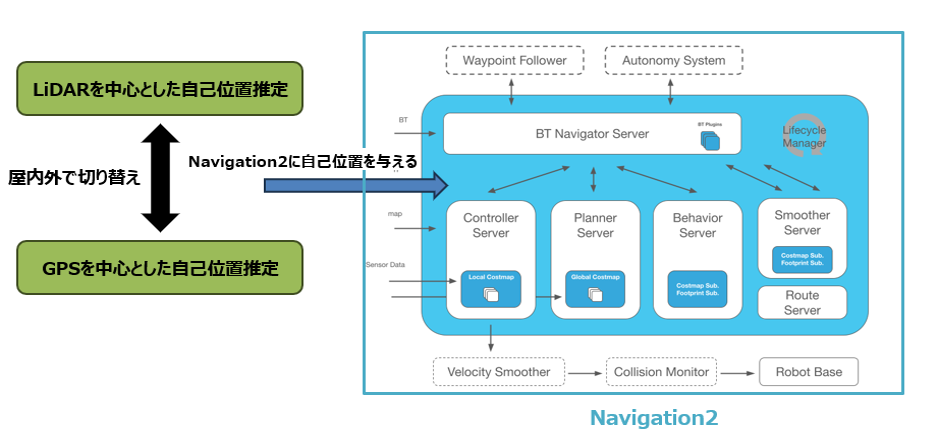
自己位置推定システムの切り替え
屋内外走行切り替え検証動画
今回の検証では、シミュレーション環境において、屋内外をシームレスに移動できる自己位置推定システムの動作を確認いたしました。この結果は、我々の技術力の高さを示すものであり、今後の製品開発に繋がる大きな一歩となりました。
しかしながら、実環境においては、センサーのノイズやGPS電波の遮蔽など、シミュレーションでは考慮できない様々な要因が考えられます。今後は実機を用いた実証実験を行い、これらの課題を一つ一つ解決していく所存です。特に、屋内外でのシームレスな移動を実現するためのアルゴリズムの高度化や、環境の変化に柔軟に対応できるロボットの開発に注力してまいります。
お客様にご満足いただける、より高性能な自律移動ロボットの開発を目指し、日々技術革新に取り組んでおります。
ROSとROS2開発はぜひ、
富士ソフトにご用命ください!