![]()
![]()
NVIDIA Omniverseとは、NVIDIA社が提供する産業のデジタル化やPhysical AI(物理AI)シミュレーションのためのオープンプラットフォームです。効率的に3Dアプリケーションを開発し、共有し、シミュレーションを行うことができるように設計されています。主な特徴としては、リアルタイムに行える共同作業や、高度な物理シミュレーション、OpenUSDを基盤とした構築による様々なツールとの連携により、仮想空間を用いて現実空間の課題に対応できることです。
代表的なOmniverseのサービスとして、シミュレーションツールであるOmniverse Isaac SimやクラウドプラットフォームのOmniverse Cloud、AIを使った顔のアニメーション生成ができるOmniverse Audio2Faceなどが挙げられます。また、新サービスとして実世界の施設に導入する前に、デジタルツインでロボット フリートを大規模に開発およびテストを行うMega Omniverse Blueprintや、Physical AI開発用のNVIDIA Cosmosなども発表され、Omniverseの注目度は高まっています。
NVIDIA Omniverse Isaac Sim(アイザックシム)は、Omniverseを基盤するロボティクスシミュレーションプラットフォームです。フォトリアルな仮想環境(デジタルツイン)が特徴であり、AIベースのロボット開発、自律移動ロボットのソフトウェア開発、ロボットアームのシミュレーション、デジタルツインなど様々な用途で使用することができます。
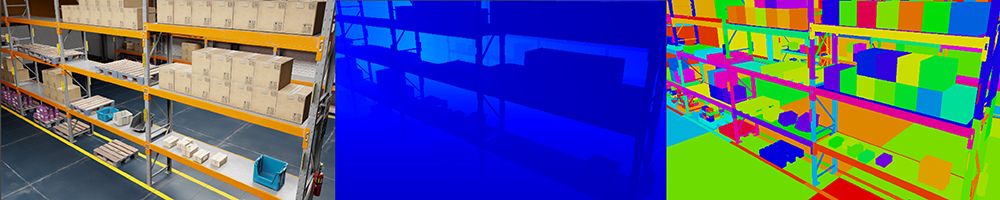
また、AIモデルのトレーニング用のバウンディングボックス、深度、セグメンテーションなどに対応したデータセットを自動生成するOmniverse Replicator、ロボットのAI学習のためのIsaac Lab(旧 : Isaac Gym)などのサポートツールが準備されているため、より実践的かつ効率的なロボット開発を進めることができます。
Isaac Sim Replicatorは、効率的な合成データの生成を可能にするIsaac Simの拡張ツールです。主にAIやロボットのトレーニングに必要な大量の高品質なデータセットを効率的に作成するために使用されます。Isaac Simのシミュレーション環境を活用することで、RGB画像や深度画像、セグメンテーションマスクなどの様々なデータの入手を簡単に行うことができます。さらに照明、カメラの位置、オブジェクトの配置などの環境ランダム化や、バウンディングボックス、セグメンテーションなどのアノテーション付きデータの自動生成もでき、より効率的な合成データの生成が可能です。
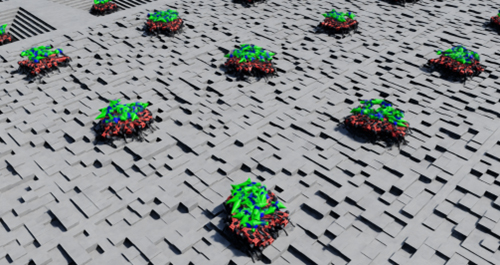
Isaac Labは、Isaac Simをベースに構築されたロボット学習用の統合モジュール フレームワークです。四足歩行ロボットや二足歩行ロボット(ヒューマノイドロボット)のロボットAI開発に適しており、NVIDIA社のGPUを最大限に活用することで、数千台のロボットをIsaac Sim上で動かし、効率的な模倣学習や強化学習を行うことができるという大きな特徴も持っています。また、Isaac SimはROS2対応しているため、Isaac Labで学習したロボット制御も実際のロボット環境とシームレスに連携が可能です。
Isaac GR00T(グルート)は、NVIDIAが開発した汎用ロボット向けの基盤AIモデルおよび開発プラットフォームです。ヒューマノイドロボットを念頭に置いて設計されており、マルチモーダルな入力(画像、テキスト、音声、人間のデモなど)を理解し、複雑なタスクをこなすロボットの「頭脳」として機能します。
GR00Tモデルは事前学習によって、物体をつかむ、持ち上げる、両手で渡すといった基本的なマニピュレーション動作を、標準状態でもある程度こなすことができます。さらに、これをベースにすることで、特定のロボットや用途に合わせたタスク学習を、少ないデータで効率的に行えるのが特徴です。また、Isaac Labと組み合わせれば、シミュレーション上でGR00Tモデルを再学習(ファインチューニング)し、現実のロボットにスムーズに適用することができます。
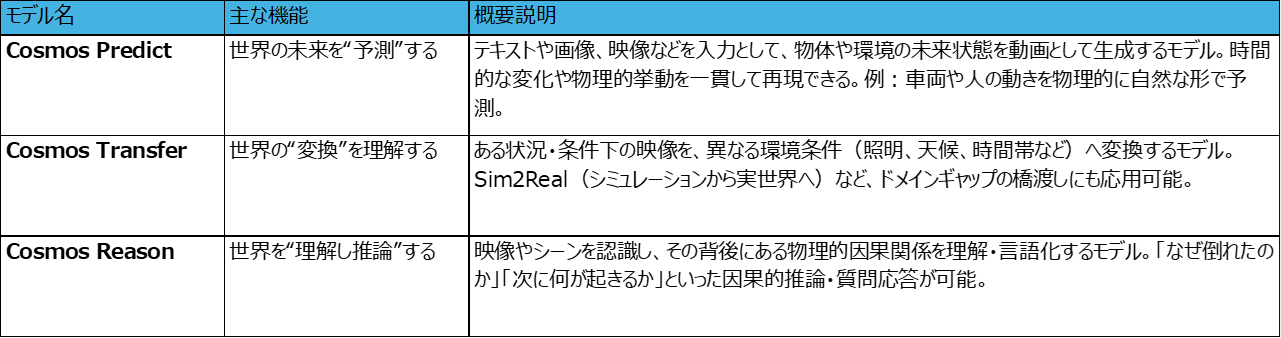
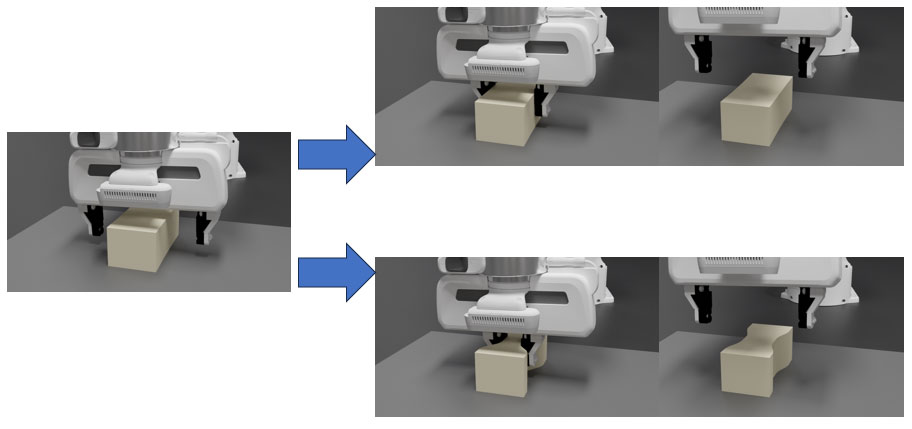
NVIDIA Cosmosとは、NVIDIAが提唱するPhysical AI(物理世界を認識・理解して、行動するAI)開発を加速させるためのプラットフォームです。現実世界の物理法則や因果関係を学習し、映像・動作・環境の変化を高精度に再現・予測できる点が特徴で、ロボティクス、自動運転、産業シミュレーションなどの分野でPhysical AIの基盤を担います。
Cosmosは、目的に応じて複数のワールド基盤モデル(WFM)で構成されており、その中核となるが、Cosmos Predict, Transfer, Reasonの3つです。Cosmosは、これらのWFMを通じて、現実世界を観測(Reason)→変換(Transfer)→予測(Predict)の三段階で理解・再構築することを目指しています。
OpenUSDとは、Pixar Animation Studiosによって開発された3Dファイルフォーマットです。NVIDIA社は、OpenUSDを基盤軸としてOmniverseを構築しており、OmniverseのIsaac SimもOpenUSDを基盤技術として採用しています。その背景としては、OpenUSDは一貫性のあるフォーマットや複雑なシーンの管理ができる階層構造、高い拡張性など特徴を持ち、3Dデータの制作を効率化できるからです。また、NVIDIA社は、生成AIによるOpenUSDファイルの生成やOpenUSDファイルの検索(膨大に準備されたアセットから検索)などのOpenUSD関連のツールも公開しており、よりスムーズにIsaac Sim上でのシーン作成やロボット開発することができます。

PhysXとは、NVIDIA社が開発したリアルタイム物理シミュレーションを提供する物理エンジンです。ゲーム開発、VR/AR、映像制作など様々な用途で広がりを見せている注目度の高い物理エンジンであり、Isaac SimもPhysXを活用しており、衝突検出や剛体力学、柔体力学など様々なシミュレーションを可能としております。
Newtonとは、NVIDIA,Google DeepMind, Disney Researchによって、ロボットの学習と開発を促進するために開発されたオープンソースの拡張可能な物理エンジンです。NVIDIA WarpやOpenUSDを基盤としており、ロボットが複雑なタスクをより高精度、高速、そして拡張性の高い方法で学習することを可能にします。また、Newtonは、Isaac Labのロボット学習フレームワークと互換性があり、Isaac Labのトレーニング環境と容易に統合できます。従来の Isaac Lab では、PhysX を基盤とする Isaac Sim と、PyTorch ベースの学習フレームワーク(Isaac Lab)間でデータの受け渡し時にフォーマット変換やメモリ転送が必要でした。 しかし Newton の導入により、物理状態を PyTorch 互換のテンソル API を通じて直接扱えるようになり、データ変換が不要となって、シミュレーションと学習の統合処理が高速化されました。
Isaac ROSとは、NVIDIA社が提供するROS2(Robot Operating System 2)向けのソフトウェアフレームワークです。主にNVIDIAのGPUを搭載したPCやJetsonを活用したロボティクスアプリケーションの開発を支援するために設計されています。ライブラリとしては、Visual SLAMベースの位置特定や、画像処理技術、物体検出等が準備されています。Isaac Simと技術的に別ですが、Isaac Simは、ROS/ROS2対応しているため、Isaac Sim上で構築した環境、自律移動ロボットでIsaac ROSを用いたロボット開発を行うことで、スムーズなロボット開発を進めることができます。
また、Isaac ROS上に構築された自立移動ロボット(AMR)向けの高度な3D視覚認識システムとしてIsaac Perceptorというライブラリも提供されており、Isaac Perceptorは、CUDAによる高速処理とAIモデルを活用し、倉庫や工場、屋外などの非構造環境でのロボット認識、自己位置推定、ナビゲーションを支援します。

Isaac Simを用いた柔軟物シミュレーションの調査
外界カメラを活用したAMRの衝突回避システム機能を検証。
Unityによる可視化で、動作や効果を直感的に確認しながら動作検証を実施。

ROSを用いたデジタルツインによる実機での自律移動ロボットとIsaac Sim内モデル間での走行挙動の連動
デジタルツインとして、自律移動ロボットでのリアルタイム同期の事例があまり見られない。Isaac Simを用いてシミュレーション上の自律移動ロボットと実機の同期を検証
本記事では、Isaac Lab v2.0で新学習タスクとして追加されたAMP(Adversarial Motion Priors)によるヒューマノイドロボットの強化学習をご紹介させていただきます。
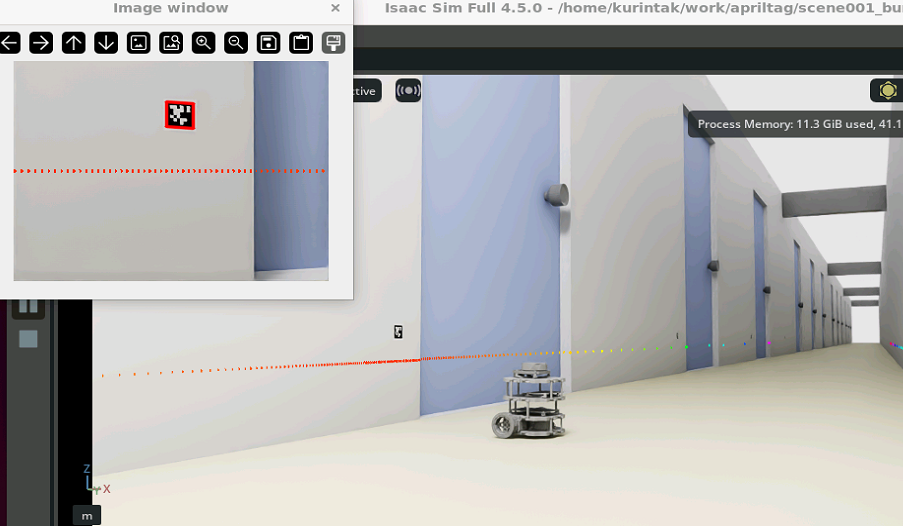
2025年初旬、Isaac Simがバージョン4.5へとアップデートされました。今回のアップデートは、メジャーバージョンに匹敵するほどの大きな変更が含まれています。前回のIsaac Sim 4.0.0の際には、当社が力を入れているROS連携に関するアップデートを中心にご紹介しましたが、今回の4.5ではROSに関する大きな変更はありません。そこで本記事では、4.5で追加・改善された主な変更点の中から、注目度が高いポイントをピックアップしてご紹介します。
2024年にメジャーアップデートされたIsaac Sim 4.0.0では、ROS2との連携が大幅に強化されました。当社は、物理シミュレーション技術であるIsaac Simとロボット制御システムであるROS2に、リリース当初から力を入れており、今回のメジャーアップデートにも大変注目しています。本記事では、Isaac Sim 4.0.0の概要とROS2との連携についてご紹介します。
NVIDIAがリリースしている3Dシミュレーションに特化したプラットフォームであるOmniverseのサービスの一つとして、Isaac Labというアプリケーションがあります。本記事では、Isaac Labのインストール方法と四足歩行ロボット強化学習の方法をご紹介します。
KUMICO
この連載では、NVIDIA社のロボット開発フレームワーク「NVIDIA Isaac」に実装されている最新の機能や技術を紹介します。今回は、Omniverseのプラグインである「Warehouse Creator」をシミュレータ「Isaac Sim 2022.2.1」で使用する方法を紹介します。
Monoist
ロボットプラットフォームとして知られる「ROS」の需要が高まり続けている。本稿では前後編に分けて、ROSの進化とデジタルツインの可能性について考察する。前編では、ROSの最新動向とデジタルツインへの対応状況について紹介する。
Monoist
ロボットの開発に広く利用されるようになっているロボット開発プラットフォーム「ROS(Robot Operating System)」の活用について解説する本連載。今回は、「ROSの活用シーンとしてのシミュレーターとの連携」をテーマに、ロボット開発におけるシミュレーターの重要性や、ROSと連携可能なシミュレーターなどについて解説する。
Monoist
ロボットプラットフォームとして知られる「ROS」の需要が高まり続けている。本稿では前後編に分けて、ROSの進化とデジタルツインの可能性について考察する。後編では、ROSのデジタルツイン活用の事例として、ROS 2を実装したロボットの実機とシミュレーションの連動について紹介する。
※ 記載されている会社名、製品名は各社の商標または登録商標です。
ロボットシミュレータにお困りの方はぜひ、
富士ソフトにご用命ください!