![]()
![]()
外界カメラを活用したAMRの衝突回避システム機能を検証。
Unityによる可視化で、動作や効果を直感的に確認しながら動作検証を実施。
人手不足や業務効率化の問題解決として自律移動ロボット(AMR)の普及が進む中、その安全性の確保が重要な課題となっています。
しかし、従来のAMRの搭載センサ(2D LiDAR)には技術的限界があり、検知できる範囲に制約があります。
この制約の一つとして、障害物の向こう側にいる人物を検知できないという問題があり、死角での衝突事故のリスクが存在しています。
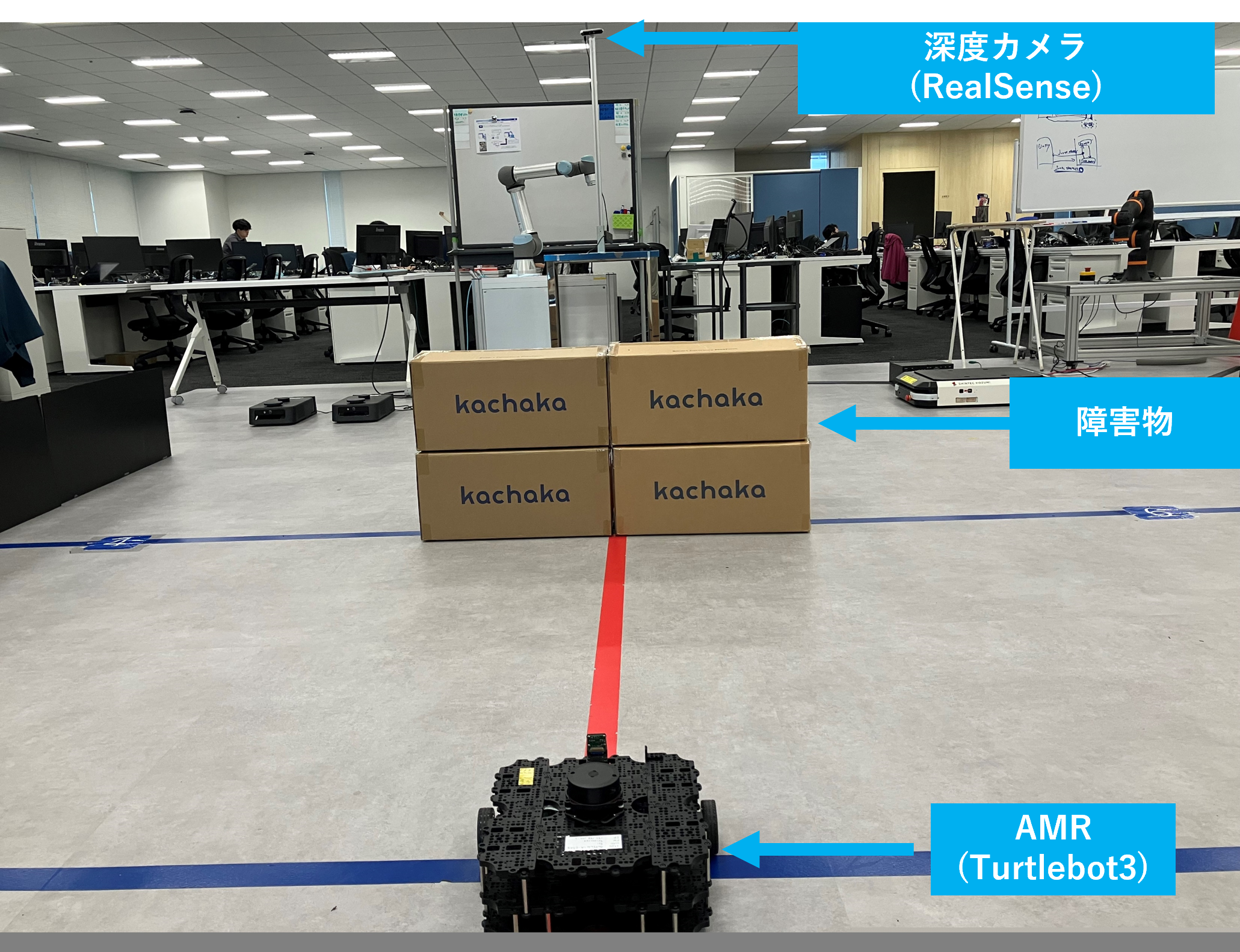
例えば、倉庫内での作業中に、棚や荷物の陰から突然現れる作業員との衝突や、病院での廊下の曲がり角にいる人との衝突など、さまざまなシナリオで安全上の懸念が生じています。 本事例では、障害物奥の人物を検出できずに死角でロボットと衝突してしまうという問題を解決するために、外界に設置した深度カメラを活用したROS 2上の衝突回避システムを開発し、このシステムによって障害物の向こう側の人物とロボットが衝突しないことをUnityを用いたリアルタイムビジュアライゼーションを活用し検証しました。
このシステムは、人工知能技術と3D位置検出を組み合わせることで、AMRの視野外にある人を検知、ROS 2の自律移動ライブラリ「Navigation2」を使ってAMR動作を適切に制御して安全性を向上させます。
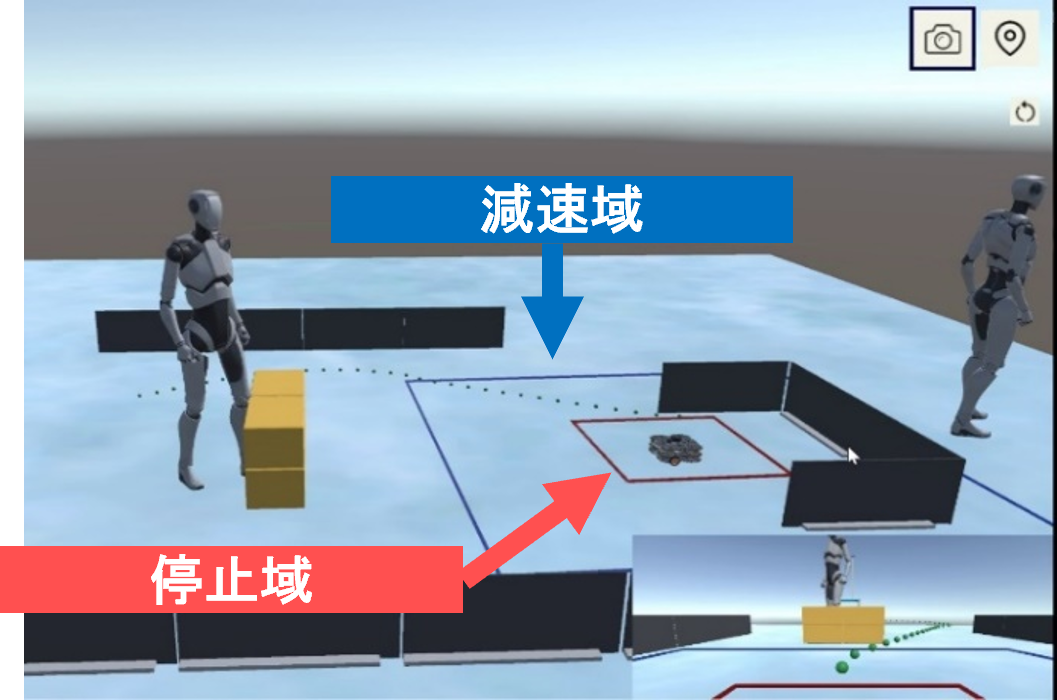
特に、Unityエンジンを利用したデジタルツインのリアルタイムビジュアライゼーションで、ロボットや人の位置や安全領域を表示することで、システムの動作を人が直感的に理解できます。これによりAMRと人間の衝突回避効果を人が確認することが可能です。
・システムの主な特徴
1. リアルタイムデジタルツイン表示:
Unityエンジンを活用し、AMR、検出された人物、安全領域(減速域・停止域)をリアルタイムで3D表示し、
システムの動作や人物の動きに応じたAMRのアクション変化を視覚的に確認
2.人工知能による人物検知:
YOLOによる人物検出で、カメラ画像から人物を正確に識別。
3. リアルタイム3D位置把握:
検出されたBounding Box情報と深度情報を組み合わせて3次元空間での人物の正確な位置を特定

実機による検証動画
1) ロボットはスタート地点から中央にある段ボールの障害物の右奥まで移動します。
2) その障害物の奥から人が歩いてきます。
3) 人が停止域に入った際に、ロボットが停止して接触しなければ、接触回避が成功したと見なされます。
今回の事例では、Unityエンジンを用いたリアルタイムビジュアライゼーションによって動作を確認し、外界カメラを活用した衝突回避システムを検証しました。リアルタイムでAMRの動作や人物の位置、安全領域を直感的に可視化することでシステムは期待通りに動作していることを確認しました。
当社では、シミュレーターやROS(ROS2)を活用した技術を保有しており、今後もお客様にご満足いただける開発を目指して日々取り組んでおります。
ロボットシミュレータにお困りの方はぜひ、
富士ソフトにご用命ください!