![]()
![]()

$ bash Miniconda3-latest-○○.sh
(2)インストールが完了したら、Isaac Lab用の新たなconda環境を作成し、起動
$ conda create -n isaaclab python=3.10
$ conda activate isaaclab
$ nvidia-smi
※コマンドが通らない場合は、NVIDIAのGPUドライバをインストールする必要がある(推奨バージョン)
$ pip install torch==2.4.0 --index-url https://download.pytorch.org/whl/cu118
■ CUDA12
$ pip install torch==2.4.0 --index-url https://download.pytorch.org/whl/cu121
※11.8 or 12.1以外では対応しない可能性もある
$ pip install –upgrade pip
$ pip install isaacsim==4.2.0.2 --extra-index-url https://pypi.nvidia.com
$ pip install isaacsim-rl isaacsim-replicator isaacsim-extscache-physics isaacsim-extscache-kit-sdk isaacsim-extscache-kit isaacsim-app --extra-index-url https://pypi.nvidia.com
※torchインストールと同様に依存関係でエラーが出るが、弊社の環境では、無視しても問題なかった
$ conda install -c conda-forge libstdcxx-ng
(3)Isaac Sim起動確認
$ isaacsim
$ isaacsim omni.isaac.sim.python.kit
※起動時エラーでcudnn関連のファイルがない場合は、cudnnを再インストールする
$ git clone git@github.com:isaac-sim/IsaacLab.git
$ sudo apt install cmake build-essential
$ cd ~/IsaacLab
$ ./isaaclab.sh –install
(2)Isaac Labインストール確認
$ ./isaaclab.sh -p source/standalone/tutorials/00_sim/create_empty.py
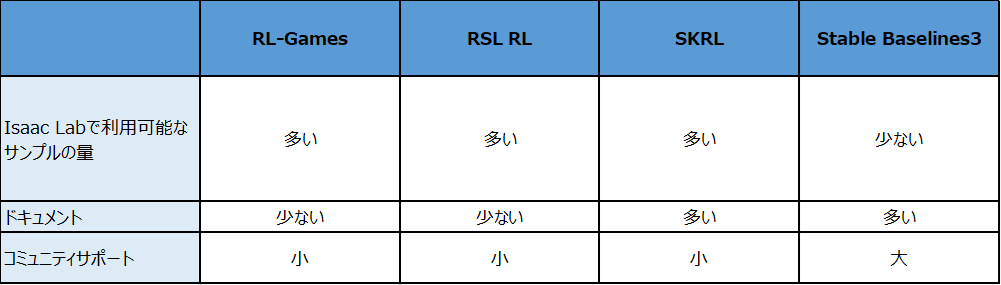
$ ./isaaclab.sh -i skrl
# 強化学習の実行
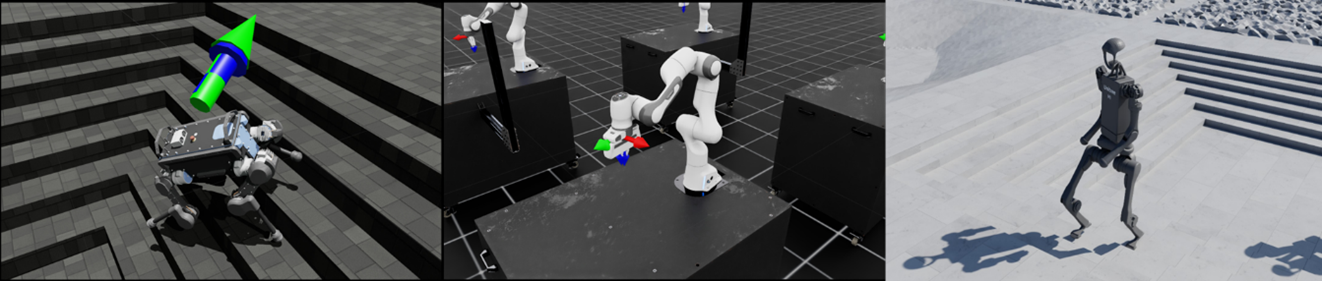
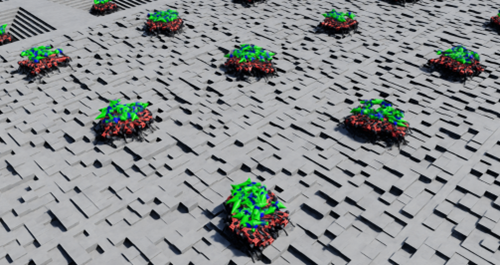
$ ./isaaclab.sh -p source/standalone/workflows/skrl/train.py --task Isaac-Velocity-Rough-Anymal-D-v0 --headless
$ ./isaaclab.sh -p source/standalone/workflows/skrl/play.py --task Isaac-Velocity-Rough-Anymal-D-v0 --num_envs 32 --checkpoint /PATH /best_agent.pt
テストの際は、2つの引数を使用する。
# Copyright (c) 2022-2025, The Isaac Lab Project Developers.
# All rights reserved.
#
# SPDX-License-Identifier: BSD-3-Clause
import math
from dataclasses import MISSING
import omni.isaac.lab.sim as sim_utils
from omni.isaac.lab.assets import ArticulationCfg, AssetBaseCfg
from omni.isaac.lab.envs import ManagerBasedRLEnvCfg
from omni.isaac.lab.managers import CurriculumTermCfg as CurrTerm
from omni.isaac.lab.managers import EventTermCfg as EventTerm
from omni.isaac.lab.managers import ObservationGroupCfg as ObsGroup
from omni.isaac.lab.managers import ObservationTermCfg as ObsTerm
from omni.isaac.lab.managers import RewardTermCfg as RewTerm
from omni.isaac.lab.managers import SceneEntityCfg
from omni.isaac.lab.managers import TerminationTermCfg as DoneTerm
from omni.isaac.lab.scene import InteractiveSceneCfg
from omni.isaac.lab.sensors import ContactSensorCfg, RayCasterCfg, patterns
from omni.isaac.lab.terrains import TerrainImporterCfg
from omni.isaac.lab.utils import configclass
from omni.isaac.lab.utils.assets import ISAAC_NUCLEUS_DIR, ISAACLAB_NUCLEUS_DIR
from omni.isaac.lab.utils.noise import AdditiveUniformNoiseCfg as Unoise
import omni.isaac.lab_tasks.manager_based.locomotion.velocity.mdp as mdp
##
# Pre-defined configs
##
from omni.isaac.lab.terrains.config.rough import ROUGH_TERRAINS_CFG # isort: skip
##
# Scene definition
##
@configclass
class MySceneCfg(InteractiveSceneCfg):
"""Configuration for the terrain scene with a legged robot."""
# ground terrain
terrain = TerrainImporterCfg(
prim_path="/World/ground",
terrain_type="generator",
terrain_generator=ROUGH_TERRAINS_CFG,
max_init_terrain_level=5,
collision_group=-1,
physics_material=sim_utils.RigidBodyMaterialCfg(
friction_combine_mode="multiply",
restitution_combine_mode="multiply",
static_friction=1.0,
dynamic_friction=1.0,
),
visual_material=sim_utils.MdlFileCfg(
mdl_path=f"{ISAACLAB_NUCLEUS_DIR}/Materials/TilesMarbleSpiderWhiteBrickBondHoned/TilesMarbleSpiderWhiteBrickBondHoned.mdl",
project_uvw=True,
texture_scale=(0.25, 0.25),
),
debug_vis=False,
)
# robots
robot: ArticulationCfg = MISSING
# sensors
height_scanner = RayCasterCfg(
prim_path="{ENV_REGEX_NS}/Robot/base",
offset=RayCasterCfg.OffsetCfg(pos=(0.0, 0.0, 20.0)),
attach_yaw_only=True,
pattern_cfg=patterns.GridPatternCfg(resolution=0.1, size=[1.6, 1.0]),
debug_vis=False,
mesh_prim_paths=["/World/ground"],
)
contact_forces = ContactSensorCfg(prim_path="{ENV_REGEX_NS}/Robot/.*", history_length=3, track_air_time=True)
# lights
sky_light = AssetBaseCfg(
prim_path="/World/skyLight",
spawn=sim_utils.DomeLightCfg(
intensity=750.0,
texture_file=f"{ISAAC_NUCLEUS_DIR}/Materials/Textures/Skies/PolyHaven/kloofendal_43d_clear_puresky_4k.hdr",
),
)
##
# MDP settings
##
@configclass
class CommandsCfg:
"""Command specifications for the MDP."""
base_velocity = mdp.UniformVelocityCommandCfg(
asset_name="robot",
resampling_time_range=(10.0, 10.0),
rel_standing_envs=0.02,
rel_heading_envs=1.0,
heading_command=True,
heading_control_stiffness=0.5,
debug_vis=True,
ranges=mdp.UniformVelocityCommandCfg.Ranges(
lin_vel_x=(-1.0, 1.0), lin_vel_y=(-1.0, 1.0), ang_vel_z=(-1.0, 1.0), heading=(-math.pi, math.pi)
),
)
@configclass
class ActionsCfg:
"""Action specifications for the MDP."""
joint_pos = mdp.JointPositionActionCfg(asset_name="robot", joint_names=[".*"], scale=0.5, use_default_offset=True)
@configclass
class ObservationsCfg:
"""Observation specifications for the MDP."""
@configclass
class PolicyCfg(ObsGroup):
"""Observations for policy group."""
# observation terms (order preserved)
base_lin_vel = ObsTerm(func=mdp.base_lin_vel, noise=Unoise(n_min=-0.1, n_max=0.1))
base_ang_vel = ObsTerm(func=mdp.base_ang_vel, noise=Unoise(n_min=-0.2, n_max=0.2))
projected_gravity = ObsTerm(
func=mdp.projected_gravity,
noise=Unoise(n_min=-0.05, n_max=0.05),
)
velocity_commands = ObsTerm(func=mdp.generated_commands, params={"command_name": "base_velocity"})
joint_pos = ObsTerm(func=mdp.joint_pos_rel, noise=Unoise(n_min=-0.01, n_max=0.01))
joint_vel = ObsTerm(func=mdp.joint_vel_rel, noise=Unoise(n_min=-1.5, n_max=1.5))
actions = ObsTerm(func=mdp.last_action)
height_scan = ObsTerm(
func=mdp.height_scan,
params={"sensor_cfg": SceneEntityCfg("height_scanner")},
noise=Unoise(n_min=-0.1, n_max=0.1),
clip=(-1.0, 1.0),
)
def __post_init__(self):
self.enable_corruption = True
self.concatenate_terms = True
# observation groups
policy: PolicyCfg = PolicyCfg()
@configclass
class EventCfg:
"""Configuration for events."""
# startup
physics_material = EventTerm(
func=mdp.randomize_rigid_body_material,
mode="startup",
params={
"asset_cfg": SceneEntityCfg("robot", body_names=".*"),
"static_friction_range": (0.8, 0.8),
"dynamic_friction_range": (0.6, 0.6),
"restitution_range": (0.0, 0.0),
"num_buckets": 64,
},
)
add_base_mass = EventTerm(
func=mdp.randomize_rigid_body_mass,
mode="startup",
params={
"asset_cfg": SceneEntityCfg("robot", body_names="base"),
"mass_distribution_params": (-5.0, 5.0),
"operation": "add",
},
)
# reset
base_external_force_torque = EventTerm(
func=mdp.apply_external_force_torque,
mode="reset",
params={
"asset_cfg": SceneEntityCfg("robot", body_names="base"),
"force_range": (0.0, 0.0),
"torque_range": (-0.0, 0.0),
},
)
reset_base = EventTerm(
func=mdp.reset_root_state_uniform,
mode="reset",
params={
"pose_range": {"x": (-0.5, 0.5), "y": (-0.5, 0.5), "yaw": (-3.14, 3.14)},
"velocity_range": {
"x": (-0.5, 0.5),
"y": (-0.5, 0.5),
"z": (-0.5, 0.5),
"roll": (-0.5, 0.5),
"pitch": (-0.5, 0.5),
"yaw": (-0.5, 0.5),
},
},
)
reset_robot_joints = EventTerm(
func=mdp.reset_joints_by_scale,
mode="reset",
params={
"position_range": (0.5, 1.5),
"velocity_range": (0.0, 0.0),
},
)
# interval
push_robot = EventTerm(
func=mdp.push_by_setting_velocity,
mode="interval",
interval_range_s=(10.0, 15.0),
params={"velocity_range": {"x": (-0.5, 0.5), "y": (-0.5, 0.5)}},
)
@configclass
class RewardsCfg:
"""Reward terms for the MDP."""
# -- task
track_lin_vel_xy_exp = RewTerm(
func=mdp.track_lin_vel_xy_exp, weight=1.0, params={"command_name": "base_velocity", "std": math.sqrt(0.25)}
)
track_ang_vel_z_exp = RewTerm(
func=mdp.track_ang_vel_z_exp, weight=0.5, params={"command_name": "base_velocity", "std": math.sqrt(0.25)}
)
# -- penalties
lin_vel_z_l2 = RewTerm(func=mdp.lin_vel_z_l2, weight=-2.0)
ang_vel_xy_l2 = RewTerm(func=mdp.ang_vel_xy_l2, weight=-0.05)
dof_torques_l2 = RewTerm(func=mdp.joint_torques_l2, weight=-1.0e-5)
dof_acc_l2 = RewTerm(func=mdp.joint_acc_l2, weight=-2.5e-7)
action_rate_l2 = RewTerm(func=mdp.action_rate_l2, weight=-0.01)
feet_air_time = RewTerm(
func=mdp.feet_air_time,
weight=0.125,
params={
"sensor_cfg": SceneEntityCfg("contact_forces", body_names=".*FOOT"),
"command_name": "base_velocity",
"threshold": 0.5,
},
)
undesired_contacts = RewTerm(
func=mdp.undesired_contacts,
weight=-1.0,
params={"sensor_cfg": SceneEntityCfg("contact_forces", body_names=".*THIGH"), "threshold": 1.0},
)
# -- optional penalties
flat_orientation_l2 = RewTerm(func=mdp.flat_orientation_l2, weight=0.0)
dof_pos_limits = RewTerm(func=mdp.joint_pos_limits, weight=0.0)
@configclass
class TerminationsCfg:
"""Termination terms for the MDP."""
time_out = DoneTerm(func=mdp.time_out, time_out=True)
base_contact = DoneTerm(
func=mdp.illegal_contact,
params={"sensor_cfg": SceneEntityCfg("contact_forces", body_names="base"), "threshold": 1.0},
)
@configclass
class CurriculumCfg:
"""Curriculum terms for the MDP."""
terrain_levels = CurrTerm(func=mdp.terrain_levels_vel)
##
# Environment configuration
##
@configclass
class LocomotionVelocityRoughEnvCfg(ManagerBasedRLEnvCfg):
"""Configuration for the locomotion velocity-tracking environment."""
# Scene settings
scene: MySceneCfg = MySceneCfg(num_envs=4096, env_spacing=2.5)
# Basic settings
observations: ObservationsCfg = ObservationsCfg()
actions: ActionsCfg = ActionsCfg()
commands: CommandsCfg = CommandsCfg()
# MDP settings
rewards: RewardsCfg = RewardsCfg()
terminations: TerminationsCfg = TerminationsCfg()
events: EventCfg = EventCfg()
curriculum: CurriculumCfg = CurriculumCfg()
def __post_init__(self):
"""Post initialization."""
# general settings
self.decimation = 4
self.episode_length_s = 20.0
# simulation settings
self.sim.dt = 0.005
self.sim.render_interval = self.decimation
self.sim.disable_contact_processing = True
self.sim.physics_material = self.scene.terrain.physics_material
# update sensor update periods
# we tick all the sensors based on the smallest update period (physics update period)
if self.scene.height_scanner is not None:
self.scene.height_scanner.update_period = self.decimation * self.sim.dt
if self.scene.contact_forces is not None:
self.scene.contact_forces.update_period = self.sim.dt
# check if terrain levels curriculum is enabled - if so, enable curriculum for terrain generator
# this generates terrains with increasing difficulty and is useful for training
if getattr(self.curriculum, "terrain_levels", None) is not None:
if self.scene.terrain.terrain_generator is not None:
self.scene.terrain.terrain_generator.curriculum = True
else:
if self.scene.terrain.terrain_generator is not None:
self.scene.terrain.terrain_generator.curriculum = False
ロボットシミュレータにお困りの方はぜひ、
富士ソフトにご用命ください!