1.はじめに
2025年初旬、Isaac Simがバージョン4.5へとアップデートされました。今回のアップデートは、メジャーバージョンに匹敵するほどの大きな変更が含まれています。前回のIsaac Sim 4.0.0の際には、当社が力を入れているROS連携に関するアップデートを中心にご紹介しましたが、今回の4.5ではROSに関する大きな変更はありません。そこで本記事では、4.5で追加・改善された主な変更点の中から、注目度が高いポイントをピックアップしてご紹介します。
2.Isaac Sim4.5.0の大きな変更点
① リファレンスアプリケーションテンプレートによる柔軟な起動構成
最小構成 or フル構成で高速かつ柔軟な起動が可能に。
② URDFインポート機能の大幅改善
ジョイント設定も含めて、より簡単に自作ロボットを取り込める。
③ 物理特性の改善
より現実に近い間接挙動を再現できるような剛性や減衰の設定を取り入れる。
④ ジョイント可視化ツールの新規追加
ジョイントの構造や制限範囲を視覚的に確認できる。
⑤ 物理精度と統計情報の可視化
衝突数や負荷をリアルタイムでモニタリング可能に。
⑥ アセットブラウザの追加・アップデート
ロボットやセンサーの検索・プレビューがスムーズに。
⑦ 新規ロボットモデルの追加といくつか既存モデルのリフレッシュ
ANYmalシリーズなどのメジャーモデルの追加やURシリーズなどのリフレッシュ
⑧ NVIDIA Cosmosによる合成データ生成の連携
生成AIとの連携で学習用データの自動生成が視野に。
3.注目度が高いポイントについての解説
大きな改善点として①~⑧まで挙げましたが、注目度が高いポイントに絞って実際のIsaac Simでの動作を交えていくつか解説します。
・ リファレンスアプリケーションテンプレートによる柔軟な起動構成
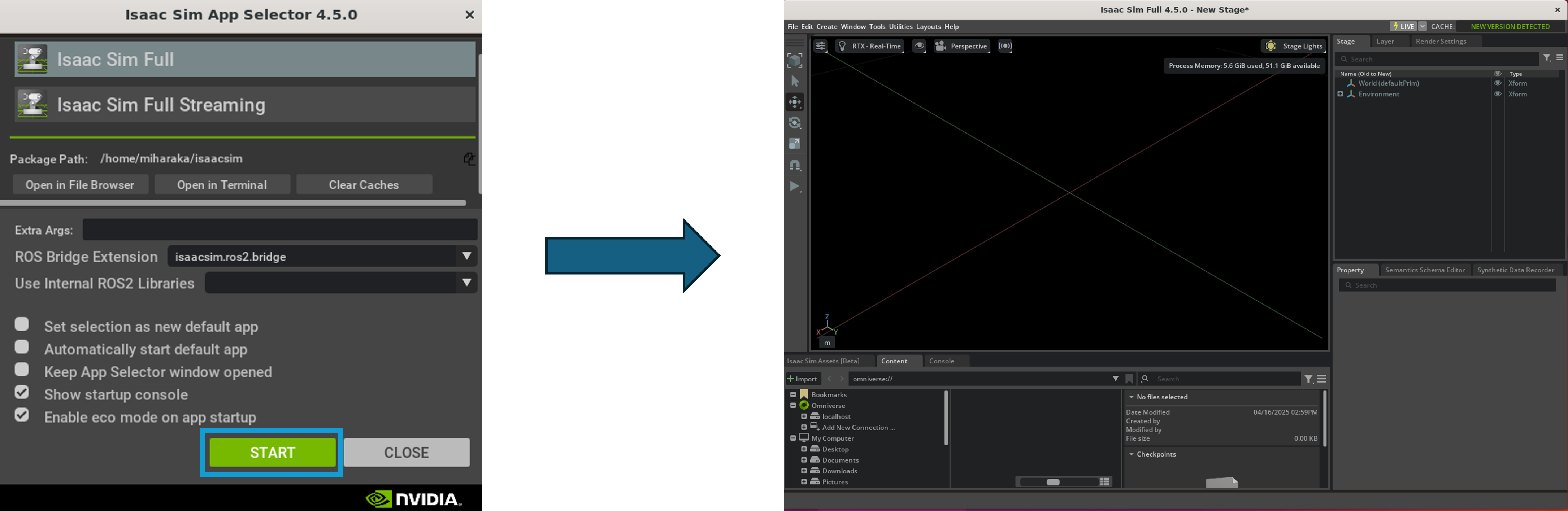
Isaac Sim 4.5では、アプリケーション構造がリファレンステンプレート方式に刷新され、最小構成(Minimal)とフル構成(Full)の2つの起動オプションを選べるようになりました。従来のようにすべての拡張機能を読み込んでから起動する必要がなくなり、起動時間は最大30%短縮されています。
加えて、これまではOmniverse Launcher経由でのインストール・起動がデフォルト(推奨)でしたが、4.5では専用ページからスタンドアロン形式で直接インストール・起動することとなりました。これは、Omniverse Launcherから2025年10月にサービス停止するために行われた処置となります。
インストール手順は、こちらに沿って行うことができ、今までのIsaac Simでは、起動後すぐにIsaac Simが起動しておりましたが、今回からは、selecterアプリケーションが起動し、そちらでオプションを選択後にSTARTを押すと、Isaac Simが起動します。
・ URDFインポート機能の大幅改善
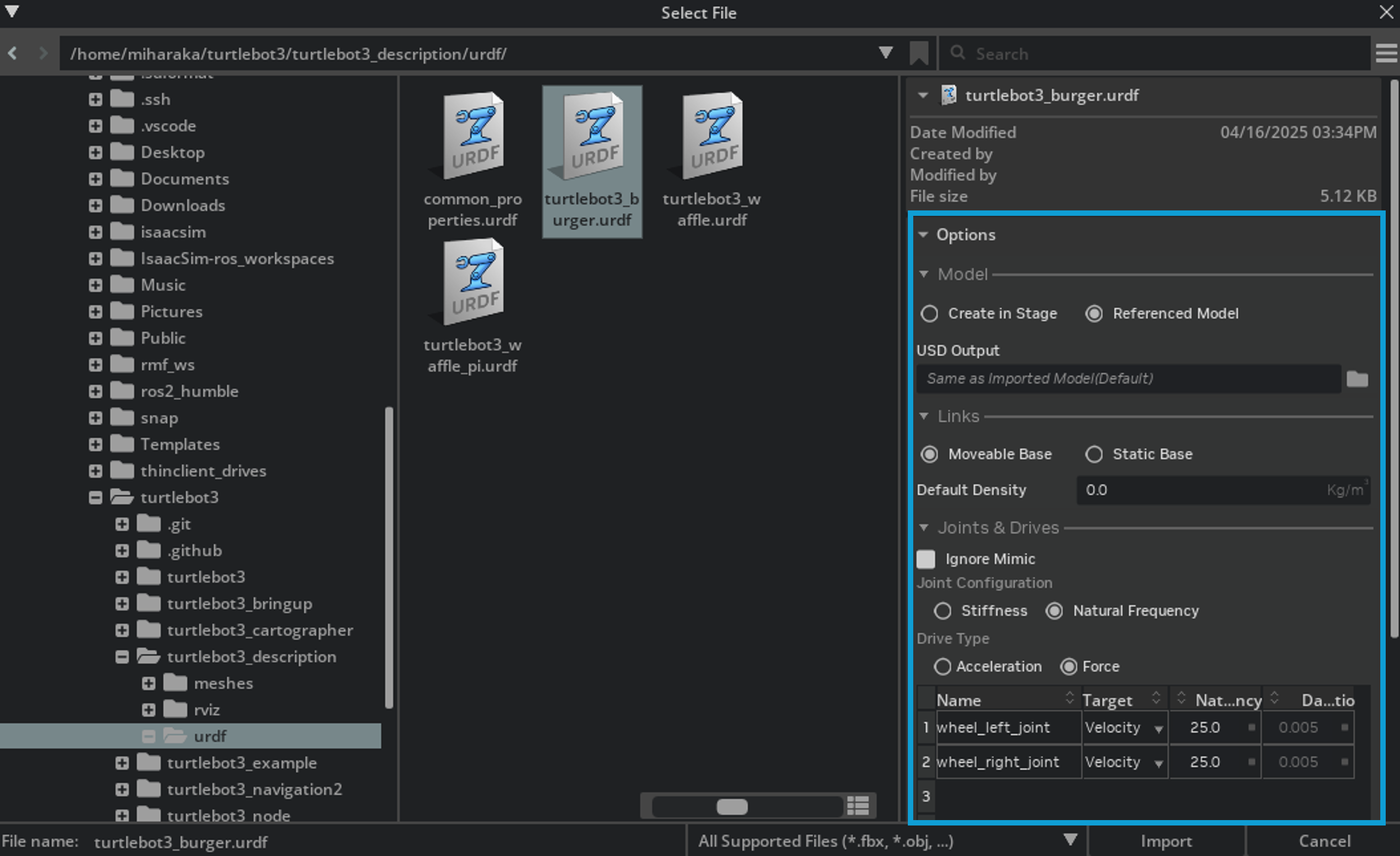
ロボットモデルのインポートが格段に使いやすくなりました。新バージョンではURDF(ロボット記述フォーマット)のインポートUIが刷新され、他の形式と同様にメニューからシームレスに読み込めるようになりました。従来はインポート後に手動調整が必要だったジョイントの設定も、4.5ではインポート時に各ジョイントのドライブ(アクチュエータ)を個別に設定でき、読み込み直後からすぐにロボットを動かせます。さらに自然周波数に基づくチューニングオプションが追加され、複雑なパラメータ調整も自動化・簡略化されています。総じて、ロボットモデル導入までの手順が簡素化され、ユーザーは自前のロボットをより短時間でシミュレーション環境に反映できます。
具体的な変更部分としては、urdfファイルを準備後に、[File] → [import]で準備したurdfファイル選択すると、右側にOptionsという項目が出現します。例えば、Turtlebot3のような移動ロボットのURDFファイルをimportしたい場合、LINKSの項目をMoveable、Drive Typeのwheel_left_jointとwheel_right_jointのターゲットを「 Velocity 」に変更することで、適切な駆動を行える移動ロボットを簡単に導入できます。
・ ジョイント可視化ツールの新規追加
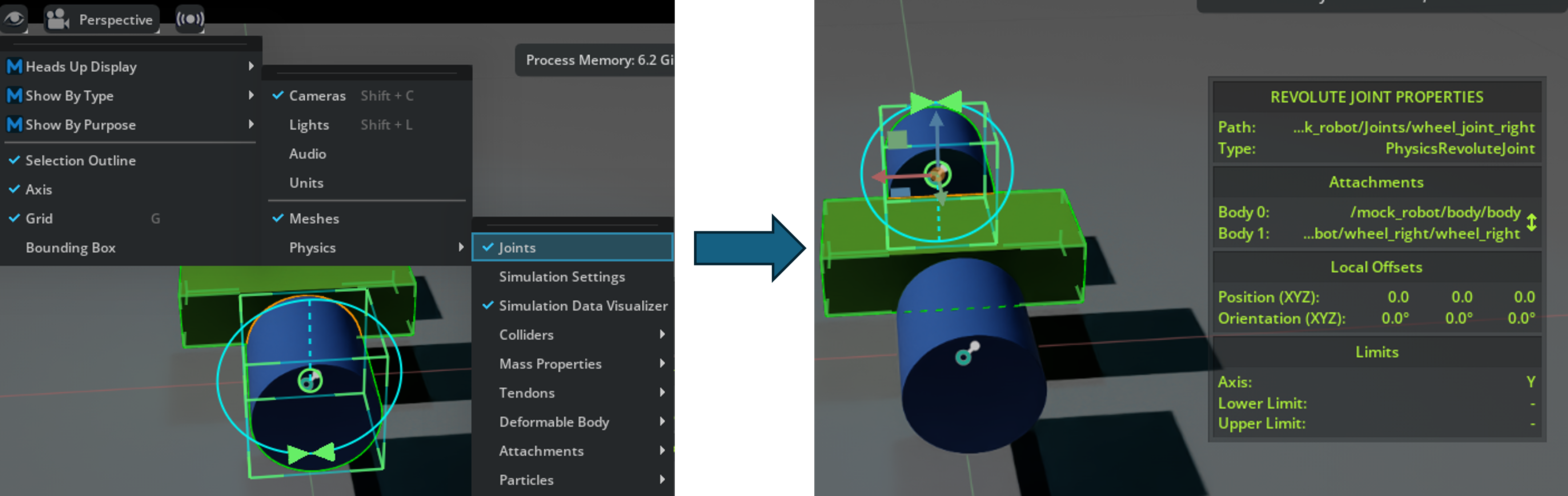
ロボットの動力学を理解しやすくするため、4.5ではジョイントの状態を可視化する専用ツールが追加されました。シーン中で任意のリンクやジョイントを選択すると、その位置や回転軸、上下限角度といった情報がビジュアルに表示されます。加えて、選択したオブジェクト(プリム)の線速度・角速度や加速度といった物理特性の数値も確認できるようになり、ロボットの関節挙動を直感的に把握できます。複雑なロボットアームの角度制限や可動範囲も一目でわかるため、シミュレーションの調整やデバッグが容易になりました。
方法としては、[Show(目のマーク)] → [Show by Type] → [Physics] → [Joints]を選択後、ViewportかStageにてジョイントを選択すると、ジョイントの詳細が可視化されます。以前から、[Show]の[Joints]という選択項目はありましたが、jointの動きがシンプルに可視化されるのみでした。4.5からは、一目でtype,親子body,可動部がわかることは大きなアップデートです。
・ アセットブラウザの追加・アップデート
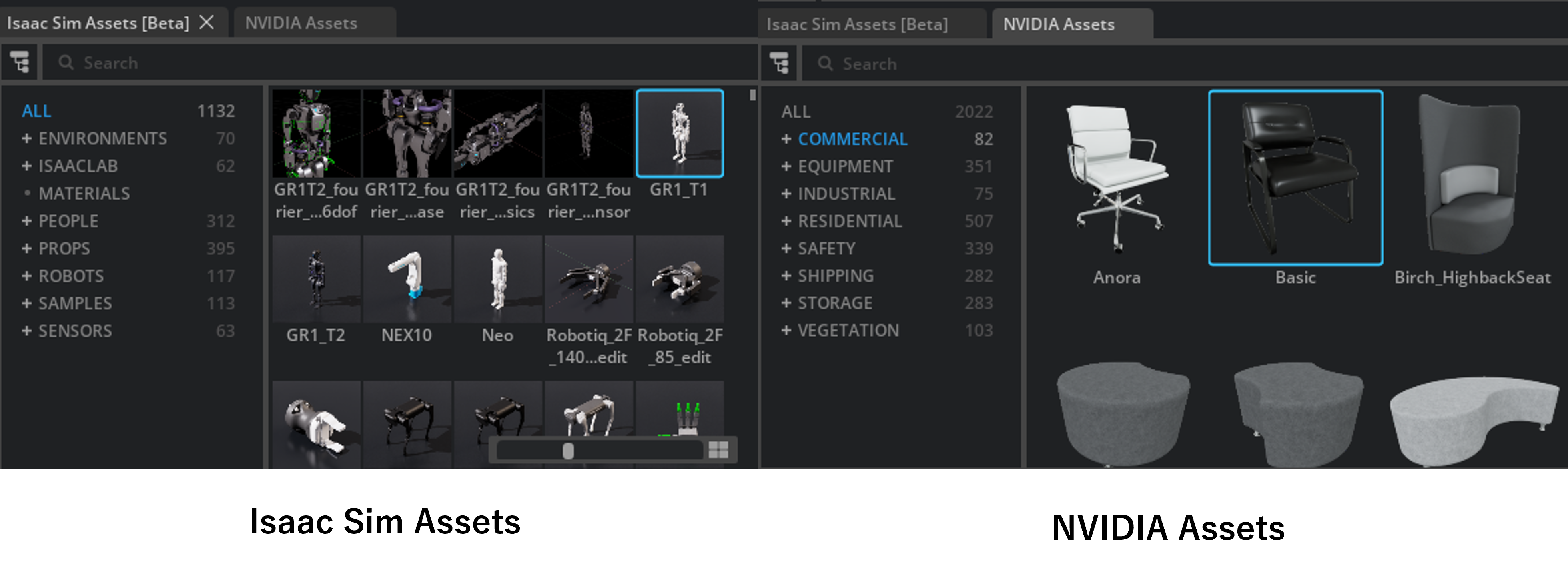
これまでのIsaac Simでは、NVIDIAが準備したアセットを利用する際、Nucleusの設定を行い、そのフォルダから見つけ出すことでアセットを利用していました。しかし、4.5からはIsaac Sim Assetsというアセット集Windowを使うように推奨されています。このIsaac Sim Assetsは、簡単にアセットの名前検索・シーンへの追加ができるようになっており、特別な設定もなく、準備されたUSD資産を扱えるようになっています。前進と思われるIsaac AssetsというWindow自体は少し前のバージョンから実装されていたものの、これまでは公式ドキュメントで積極的に使用されることはありませんでした。Isaac Sim 4.5では、公式チュートリアルやドキュメントもIsaac Sim Assetsベースに刷新されており、今後はこれが主流の使い方となると思われます。
さらに、NVIDIA Assetsというアセット集なども追加されており、ロボットより汎用的なアセットも簡単に扱えるようになっております。
・ NVIDIA Cosmosによる合成データ生成の連携
最後に、Isaac Sim本体の機能ではありませんが、CES 2025で同時に発表されたNVIDIA Cosmosにも触れておきます。NVIDIA Cosmos World Foundation Modelは巨大な生成AIモデルを用いてバーチャルな世界データを生成するプラットフォームで、Isaac Simと組み合わせることで大量のフォトリアルな合成データをロボットの学習用に作成可能になります。具体的には、Isaac Sim上でCADデータやLiDARスキャン、AI生成3Dオブジェクトなどを統合してシーンを構築し、シナリオに沿った画像や動画をレンダリングします。その出力をCosmosが取り込むことで、ロボットの認識モデルを訓練・強化するための膨大なバリエーションのデータセットを生成できるのです。このようにIsaac Sim 4.5の登場に合わせ、ロボット開発の周辺エコシステムも拡充されつつあります。今後、シミュレーションと生成AIを組み合わせた効率的なデータ収集技術が加速していくと思われます。
4.最後に
今回の記事では、Isaac Sim 4.5へのバージョンアップの主な機能を実際のIsaac Sim4.5での使い方と一緒にご紹介させていただきました。またCosmosも関連してお話しましたが、2025年注目度が高いCosmosの活用が広がるほど、Isaac Simの活用も広がっていくと思われます。
富士ソフトでは、Isaac SimやCosmos、またOmniverseを用いた研究・開発を行っており、ロボティクスやシミュレーション技術の進化を現場に届けるべく取り組んでいます。最新技術の動向を踏まえながら、お客様の課題解決や価値創出につながる実践的な提案と支援を行ってまいります。
今後も、開発現場で役立つ技術情報や最新アップデートを継続的に発信していきますので、ぜひご期待ください。