![]()
![]()
デジタルツインとして、自律移動ロボットでのリアルタイム同期の事例があまり見られない。Isaac Simを用いてシミュレーション上の自律移動ロボットと実機の同期を検証
近年、デジタルツインという技術が発達しており、仮想空間上に実空間を再現し、センサの値をリアルタイムで同期させることで、実空間での挙動改善に役立てることが可能になっています。例えば、アームロボットのシミュレーションと実機の姿勢を連動させ、シミュレーションで生成した動きを実機に反映させるという事例もあります。
NVIDIAが開発したシミュレータ「Isaac Sim」でも、アームロボットの姿勢情報をシミュレーション上のモデルと同期することで実機と動きをシンクロさせることができます。一方で、AMR等の自律移動ロボットにおいてはこのような同期例がまだ少ない状況となっています。
そこで、本研究では、ROS 2で制御できる自律移動ロボット「Turtlebot3」とIsaac Simを用いて、リアルタイムに動きの同期が可能であるかを検証しました。
具体的な検証としては、下記の環境を用意し、1,2の検証を行いました。
用意した環境
・ シミュレーター「Isaac Sim」上と実環境上に自律移動ロボット「Turtlebot3」を用意
・ それぞれROS2にて通信にて制御を行う
検証内容
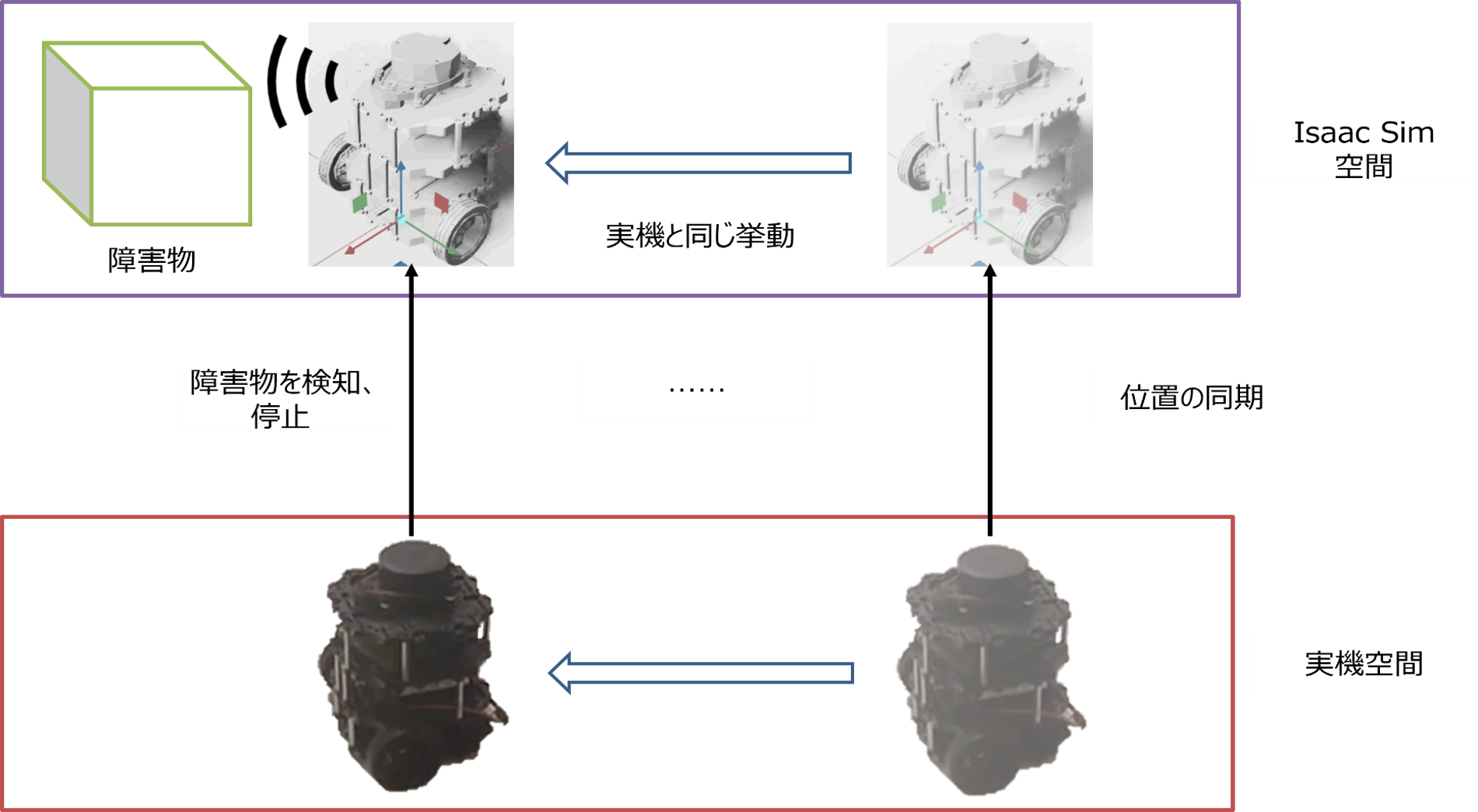
1. シミュレータ側の物理演算に関するパラメータを調整し、同じ通信で実機と同じ動きを再現することができるか。
2. 実機の位置情報をシミュレータ側に送信し、向きや姿勢を同期させることができるか。
検証内容に対する結果は、下記のとおりとなりました。
1. 物理演算に関するパラメーターが多数あり、変更しても完全に同じ動きを再現することはできず、Isaac SimのFPSによってROS通信による動作にも影響を受けてしまう
2. 実機側の位置情報をシミュレーション側に送り、APIを用いてロボットの生成をで同じ向きと姿勢を同期させられることを確認
今回の結果で、APIを用いて実機の位置情報を取得し、ロボットを動かすことで位置の同期に成功しました。
今後は他のシミュレータでの検証や、より発展的な研究を行っていきたいと考えております。
ロボットシミュレータにお困りの方はぜひ、
富士ソフトにご用命ください!