本調査では画像マーカーを用いたロボットの自己位置推定のシミュレーションを行いました。
特徴点の少ないシーンでの画像マーカーによる自己位置推定は、カメラにマーカーが写っていれば1フレームで位置を再取得できる利点がありますが、運用環境において必要な精度が確保できるようにマーカー貼付位置やサイズを決定する作業は複雑です。
これに対し、画像マーカーのシミュレーションを行うことで、マーカー貼付位置やサイズを運用前に詳細に確認することが可能になります。
シミュレーションにはNVIDIA社のIsaac Sim4.5.0とROS2(humble)を用いました。
Isaac SimにはROS対応の自律移動ロボットの配置、画像マーカーの1つであるAprilTagの表示機能、カメラ画像をROS topicとしてpublishする機能などがあるため、シミュレーション構築やROS連携が容易であることから選定しています。
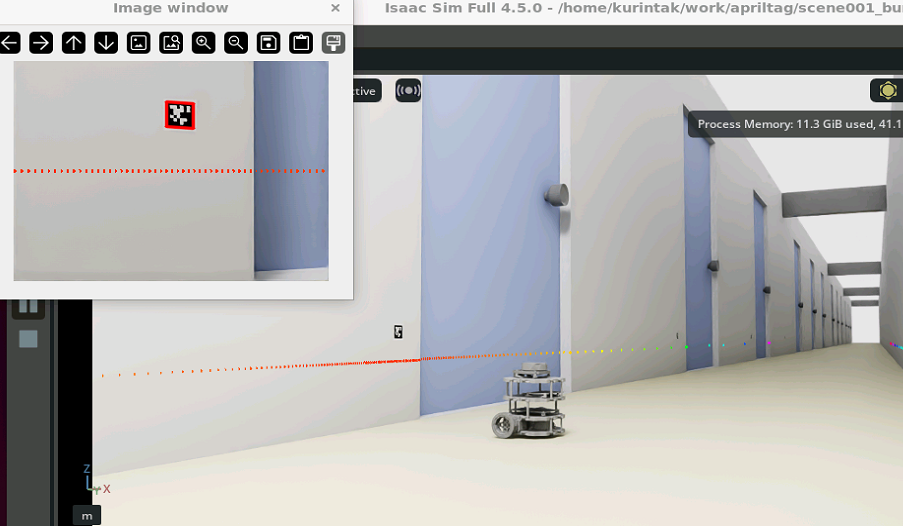
図1:Isaac SimとROS2を連携したシミュレーション
AprilTagで改善が期待される業務
AprilTagを用いると、カメラの1フレームだけで自己位置座標が取得できるため、自律走行ロボットの位置推定精度を向上させることができます。以下のような場面で特に効果を発揮します。
- 1.長い廊下の場合
-
課題:特徴点が少ないシーンではLiDARによる位置推定が困難
AprilTagによる改善:マーカーを通じて正確な位置情報を取得し、ロボットの自己位置推定を向上させることができます。これにより自己位置喪失からくる配送ミスの削減につながります。
- 2.周辺に移動物体が多い場合
-
課題:配膳ロボットや倉庫内AMRなど、周囲に多くの移動物が存在する環境では、LiDARやVSLAMだけでは位置推定が不安定になる
AprilTagによる改善:マーカーが検出できれば、人などの移動物の影響を減らして安定した位置推定が可能になります。
- 3.特定の場所で位置推定の精度を向上したい場合
-
課題:荷受け、棚卸など特定箇所だけで位置精度を向上させることは困難
AprilTagによる改善:カメラを通じて高精度な位置情報を取得し、業務の効率を向上させることができます。
AprilTag
AprilTagは「マトリクス型2次元コード」の一種で、平板上の白黒の模様からマーカーIDと位置を取得するものです。
マトリクス型2次元コードとしては「QRコード」(株式会社デンソーウェーブの登録商標)が広く普及しています。
QRコードは任意の文字列を埋め込める利点がありますが、白黒パターンは位置推定には向いていません。
同様に「ARマーカー」は、位置推定には向いていますが、情報の読み取りには向いていません。
今回のように複数種のマーカーを貼付して位置推定を行う目的では、AprilTagが適しています。
AprilTagは必要なID数やハミング距離で「ファミリー」に分けられており、今回は36h11というID587個、ハミング距離11のファミリーを選択しました。

図2:左からAprilTag, QRコード、ARマーカー
AprilTagを用いたシミュレーション:シーン作成
前記「AprilTagで改善が期待されるシーン」で説明した「長い廊下」をIsaacSim上に作成しました。
AprilTagの配置にはIsaac Simの機能を使用します。これはプロパティからタグIDやファミリーを選択するだけでAprilTagのテクスチャが貼付されるものです。
自律移動ロボットにはIsaac SimのアセットからROS2対応のTurtlebotモデルを使用します。これは3Dモデルの中にホイールコントローラーとROS2通信機能が予め組み込まれているため、シーンに配置するだけでROS2のTeleopから操作できるものです。このアセットにはカメラが含まれないため、カメラオブジェクトと画像をpublishするActionGraphを追加しています。
ROS2側ではカメラ画像をsubscribeして、カメラに写ったマーカー画像からTurtlebotの座標を算出するノードを作成しています。このノードでは、マーカーの貼付位置を配列に保持しておき、マーカーが検出されると、その貼付位置から逆算してTurtlebotの座標を算出します。

図3:Isaac Sim上に「長い廊下」のモデルを配置
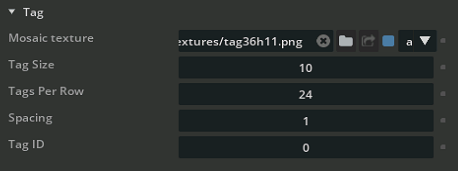
図4:Isaac SimのAprilTag設定項目
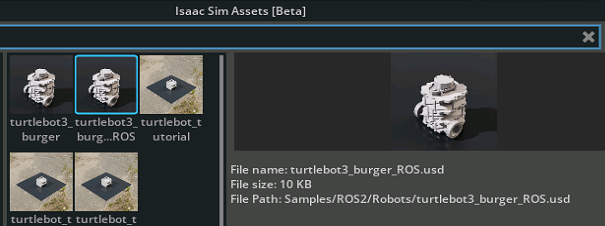
図5:Isaac SimのROS2対応Turtlebotのアセット
AprilTagを用いたシミュレーション:シミュレーション実施
シミュレーションでは長い廊下でTurtlebotを走行させ、カメラがマーカーを認識したときの距離と位置精度を、マーカーサイズを変更しながら取得しました。
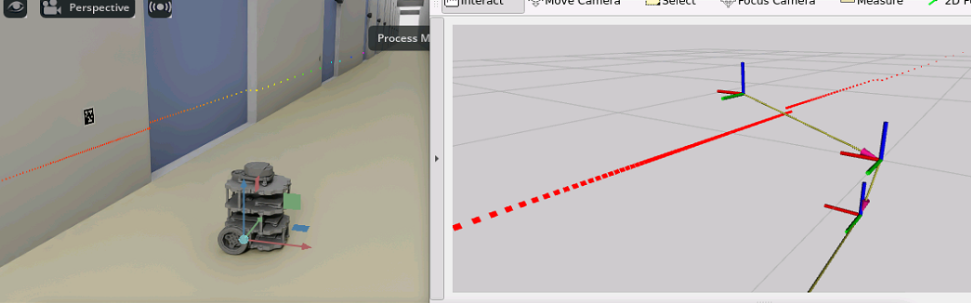
図6左:シミュレーション内を走行するTurtlebot(Isaac Sim)
右:検出されたマーカーの位置推定(ROS2)
結論:
本シミュレーションでは、AprilTagを用いた画像ベースの位置推定手法について、マーカーサイズおよび周囲環境の影響を評価しました。
マーカーサイズの影響
小型のマーカーは距離が離れるにつれて検出精度が著しく低下しました。一方、大型のマーカーは近距離ではカメラの画角からはみ出して検出不能となる場面がありました。これにより、マーカーサイズと検出精度にはトレードオフが存在することが確認されました。
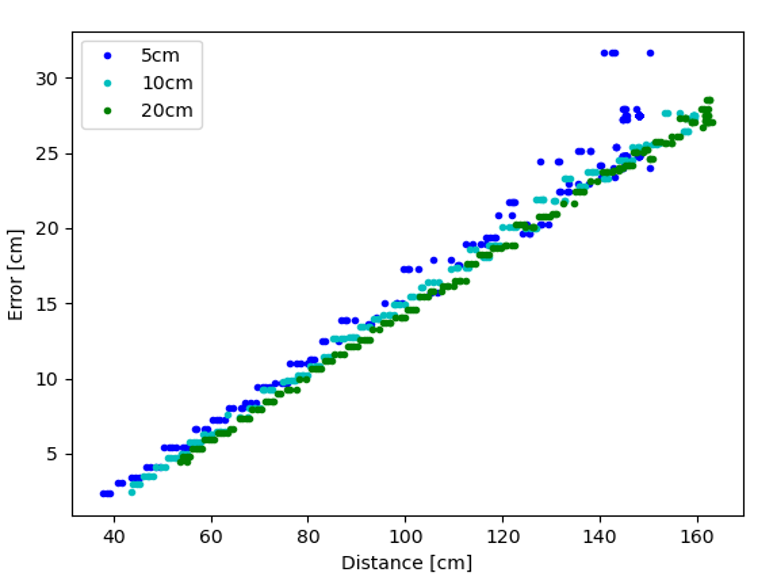
図7:マーカーまでの距離と自車位置の推定誤差(マーカーサイズ5, 10, 20cm)
人物の存在による影響
ロボット周辺に複数の人物が存在する状況でも、マーカー全体が1フレーム内に収まっていれば、位置推定が行えることが確認できました。遮蔽物が一時的に存在しても、フレーム単位での検出が可能であれば、位置推定の継続性は保たれます。

図8:障害物が多い環境でのマーカー認識(マーカー検出枠とIDの表示)
考察
AprilTagは、視認性の高い2次元バーコード型の画像マーカーであり、ロボットや自律移動体の位置推定において非常に有効な手段です。今回の実験結果から、以下のような技術的な示唆が得られます。
マーカーサイズと貼付位置の最適化
マーカーサイズは大きいほど遠距離での検出精度が向上しますが、画角からの逸脱リスクも増すため、設置環境に応じた最適なサイズ選定が重要です。例えば、天井や壁面など、カメラの視野を確保しやすい位置に貼付することで、大型マーカーの利点を最大限に活かすことができます。
動的環境への耐性
実験では、人物が多数存在する環境でも、マーカー全体が1フレームでも視野に入れば位置推定が可能であることが確認できました。これにより、配膳ロボットや倉庫内AMRなど、人の往来が多い現場でも安定した運用が期待できます。
また、マーカーが視野に入ることで即座に自己位置を再取得できるため、自己位置ロストからの復帰が迅速に行えます。これにより、再マッチング処理に伴う遅延やロボット停止を低減し、安定したナビゲーションの継続が可能となります。
AprilTagの認識は洗練された技術ですが、実環境で効果を発揮するには様々な調整が必要です。IsaacSimとROS2を連携させることで、運用場面を想定した様々なシミュレーションが可能になります。
※本動画のすべての権利は富士ソフトに帰属しておりますので、無断複製・転載を禁止させていただきます。