![]()
![]()
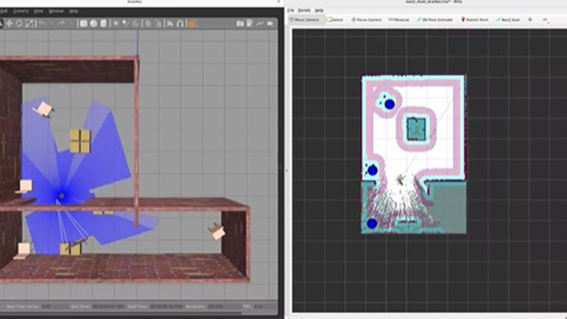
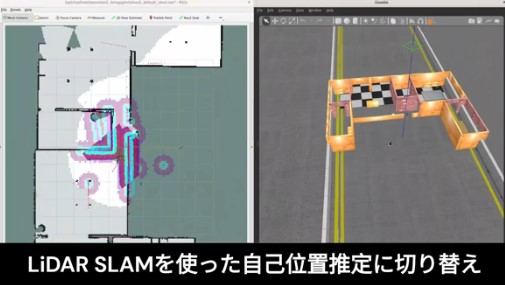
Gazeboとは、Open Roboticsによって開発されたオープンソースのロボット開発用3Dシミュレータです。ROSと同じ企業によって開発されており、ros2_controlなどのROSに対応したライブラリを使用することで、ROSとGazeboをシームレスに統合することができます。そのため、ROS 1/ROS 2の開発やROS初心者がよく利用します。URDFやSDF、worldファイルを使用してシミュレーションを行い、Moveit!/Moveit2!やNavigation Stack/Navigation2のようなロボット制御やアプリケーション開発を検証することができます。さらに、無料で利用できるため、すぐに触れて始めることができ、コミュニティも活発です。
GazeboやUnity、Isaac Simに関して、他にも多数の活用実績があります。
社外に公開できない情報もありますので、実績詳細をご希望の方はお問い合わせください。
Monoist
ロボットプラットフォームとして知られる「ROS」の需要が高まり続けている。本稿では前後編に分けて、ROSの進化とデジタルツインの可能性について考察する。前編では、ROSの最新動向とデジタルツインへの対応状況について紹介する。
Monoist
ロボットの開発に広く利用されるようになっているロボット開発プラットフォーム「ROS(Robot Operating System)」の活用について解説する本連載。今回は、「ROSの活用シーンとしてのシミュレーターとの連携」をテーマに、ロボット開発におけるシミュレーターの重要性や、ROSと連携可能なシミュレーターなどについて解説する。
Monoist
ロボットプラットフォームとして知られる「ROS」の需要が高まり続けている。本稿では前後編に分けて、ROSの進化とデジタルツインの可能性について考察する。後編では、ROSのデジタルツイン活用の事例として、ROS 2を実装したロボットの実機とシミュレーションの連動について紹介する。
※ 記載されている会社名、製品名は各社の商標または登録商標です。
ロボットシミュレータにお困りの方はぜひ、
富士ソフトにご用命ください!