![]()
![]()
Unity Technologiesが提供するリアルタイム3D開発プラットフォームで、ゲームエンジンとして広く知られています。最近では、Unity Simulation Proなどのシミュレーション機能が強化され、ロボティクス分野など他の産業でも幅広く利用されています。Unityは高品質なグラフィックスと現実に近い物理エンジン「Unity Physics」を提供し、豊富なアセットストアからダウンロード可能なアセットをUnity Asset Managerで管理できます。AI関連のツールとして、「Unity Sentis」と「Unity Muse」があり、AIの活用をサポートしています。さらに、「ROS#」や「ROS-TCP-Connector」ライブラリを使用することでROSとの連携も可能です。また、クロスプラットフォーム対応に優れており、Windows、Android、Webなど多くのプラットフォームで動作する特徴があります。
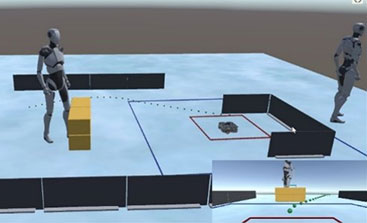
以前、MONOistの記事、及び研究にてIsaac Simと実機の位置同期の検証を行いました。この記事ではUnityとGazeboを用いて、Turtlebot3の位置同期を実現する手法について解説します。
Monoist
ロボットプラットフォームとして知られる「ROS」の需要が高まり続けている。本稿では前後編に分けて、ROSの進化とデジタルツインの可能性について考察する。前編では、ROSの最新動向とデジタルツインへの対応状況について紹介する。
Monoist
ロボットの開発に広く利用されるようになっているロボット開発プラットフォーム「ROS(Robot Operating System)」の活用について解説する本連載。今回は、「ROSの活用シーンとしてのシミュレーターとの連携」をテーマに、ロボット開発におけるシミュレーターの重要性や、ROSと連携可能なシミュレーターなどについて解説する。
Monoist
ロボットプラットフォームとして知られる「ROS」の需要が高まり続けている。本稿では前後編に分けて、ROSの進化とデジタルツインの可能性について考察する。後編では、ROSのデジタルツイン活用の事例として、ROS 2を実装したロボットの実機とシミュレーションの連動について紹介する。
※ 記載されている会社名、製品名は各社の商標または登録商標です。
ロボットシミュレータにお困りの方はぜひ、
富士ソフトにご用命ください!